diff --git a/.gitattributes b/.gitattributes
index 9af4bce..c6ed24f 100644
--- a/.gitattributes
+++ b/.gitattributes
@@ -22,6 +22,7 @@
# ROS Bags
**/resources/**/*.db3 filter=lfs diff=lfs merge=lfs -text
**/resources/**/*.yaml filter=lfs diff=lfs merge=lfs -text
+**/resources/**/*.bag filter=lfs diff=lfs merge=lfs -text
# DNN Model files
*.onnx filter=lfs diff=lfs merge=lfs -text
\ No newline at end of file
diff --git a/README.md b/README.md
index 84777d0..89ec8db 100644
--- a/README.md
+++ b/README.md
@@ -1,378 +1,96 @@
# Isaac ROS Pose Estimation
-

31 ms | [17.6 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dope_graph-orin_nx.json)
120 ms | -- | [90.9 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dope_graph-nuc_4060ti.json)
14 ms |
-| [Centerpose Pose Estimation Graph](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/scripts//isaac_ros_centerpose_graph.py) | VGA | [50.2 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-agx_orin.json)
37 ms | [23.7 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-orin_nx.json)
70 ms | [18.4 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-orin_nano_emul.json)
87 ms | [45.0 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-nuc_4060ti.json)
21 ms |
-
-## Table of Contents
-
-- [Isaac ROS Pose Estimation](#isaac-ros-pose-estimation)
- - [Overview](#overview)
- - [Performance](#performance)
- - [Table of Contents](#table-of-contents)
- - [Latest Update](#latest-update)
- - [Supported Platforms](#supported-platforms)
- - [Docker](#docker)
- - [Quickstart](#quickstart)
- - [Next Steps](#next-steps)
- - [Try More Examples](#try-more-examples)
- - [Use Different Models](#use-different-models)
- - [Customize your Dev Environment](#customize-your-dev-environment)
- - [Package Reference](#package-reference)
- - [`isaac_ros_dope`](#isaac_ros_dope)
- - [Usage](#usage)
- - [ROS Parameters](#ros-parameters)
- - [Configuration File](#configuration-file)
- - [ROS Topics Subscribed](#ros-topics-subscribed)
- - [ROS Topics Published](#ros-topics-published)
- - [`isaac_ros_centerpose`](#isaac_ros_centerpose)
- - [Usage](#usage-1)
- - [ROS Parameters](#ros-parameters-1)
- - [Configuration File](#configuration-file-1)
- - [ROS Topics Subscribed](#ros-topics-subscribed-1)
- - [ROS Topics Published](#ros-topics-published-1)
- - [CenterPose Network Output](#centerpose-network-output)
- - [Troubleshooting](#troubleshooting)
- - [Isaac ROS Troubleshooting](#isaac-ros-troubleshooting)
- - [Deep Learning Troubleshooting](#deep-learning-troubleshooting)
- - [Updates](#updates)
-
-## Latest Update
-
-Update 2023-05-25: Performance improvements.
-
-## Supported Platforms
-
-This package is designed and tested to be compatible with ROS 2 Humble running on [Jetson](https://developer.nvidia.com/embedded-computing) or an x86_64 system with an NVIDIA GPU.
-
-> **Note**: Versions of ROS 2 earlier than Humble are **not** supported. This package depends on specific ROS 2 implementation features that were only introduced beginning with the Humble release.
-
-| Platform | Hardware | Software | Notes |
-| -------- | -------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- | ------------------------------------------------------------------------------------------------------------------ | --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------- |
-| Jetson | [Jetson Orin](https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-orin/)
[Jetson Xavier](https://www.nvidia.com/en-us/autonomous-machines/embedded-systems/jetson-agx-xavier/) | [JetPack 5.1.1](https://developer.nvidia.com/embedded/jetpack) | For best performance, ensure that [power settings](https://docs.nvidia.com/jetson/archives/r34.1/DeveloperGuide/text/SD/PlatformPowerAndPerformance.html) are configured appropriately. |
-| x86_64 | NVIDIA GPU | [Ubuntu 20.04+](https://releases.ubuntu.com/20.04/)
[CUDA 11.8+](https://developer.nvidia.com/cuda-downloads) |
-
-### Docker
-
-To simplify development, we strongly recommend leveraging the Isaac ROS Dev Docker images by following [these steps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common/blob/main/docs/dev-env-setup.md). This will streamline your development environment setup with the correct versions of dependencies on both Jetson and x86_64 platforms.
-
-> **Note**: All Isaac ROS Quickstarts, tutorials, and examples have been designed with the Isaac ROS Docker images as a prerequisite.
-
-## Quickstart
-
-> **Warning**: Step 7 must be performed on `x86_64`. The resultant model should be copied over to the `Jetson`. Also note that the process of model preparation differs significantly from the other repositories.
-
-1. Set up your development environment by following the instructions [here](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common/blob/main/docs/dev-env-setup.md).
-2. Clone this repository and its dependencies under `~/workspaces/isaac_ros-dev/src`.
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src
- ```
-
- ```bash
- git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common
- ```
-
- ```bash
- git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_nitros
- ```
-
- ```bash
- git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_pose_estimation
- ```
-
- ```bash
- git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference
- ```
-
- ```bash
- git clone https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_image_pipeline
- ```
-
-3. Pull down a ROS Bag of sample data:
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src/isaac_ros_pose_estimation && \
- git lfs pull -X "" -I "resources/rosbags/"
- ```
-
-4. Launch the Docker container using the `run_dev.sh` script:
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src/isaac_ros_common && \
- ./scripts/run_dev.sh
- ```
-
-5. Make a directory to place models (inside the Docker container):
-
- ```bash
- mkdir -p /tmp/models/
- ```
-
-6. Select a DOPE model by visiting the DOPE model collection available on the official [DOPE GitHub](https://github.com/NVlabs/Deep_Object_Pose) repository [here](https://drive.google.com/open?id=1DfoA3m_Bm0fW8tOWXGVxi4ETlLEAgmcg). The model is assumed to be downloaded to `~/Downloads` outside the Docker container.
-
- This example will use `Ketchup.pth`, which should be downloaded into `/tmp/models` inside the Docker container:
- > **Note**: this should be run outside the Docker container
-
- On `x86_64`:
-
- ```bash
- cd ~/Downloads && \
- docker cp Ketchup.pth isaac_ros_dev-x86_64-container:/tmp/models
- ```
-
-7. Convert the PyTorch file into an ONNX file:
- > **Warning**: this step must be performed on `x86_64`. The resultant model will be assumed to have been copied to the `Jetson` in the same output location (`/tmp/models/Ketchup.onnx`)
-
- ```bash
- python3 /workspaces/isaac_ros-dev/src/isaac_ros_pose_estimation/isaac_ros_dope/scripts/dope_converter.py --format onnx --input /tmp/models/Ketchup.pth
- ```
-
- If you are planning on using Jetson, copy the generated `.onnx` model into the Jetson, and then copy it over into `aarch64` Docker container.
-
- We will assume that you already performed the transfer of the model onto the Jetson in the directory `~/Downloads`.
-
- Enter the Docker container in Jetson:
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src/isaac_ros_common && \
- ./scripts/run_dev.sh
- ```
-
- Make a directory called `/tmp/models` in Jetson:
-
- ```bash
- mkdir -p /tmp/models
- ```
-
- **Outside** the container, copy the generated `onnx` model:
-
- ```bash
- cd ~/Downloads && \
- docker cp Ketchup.onnx isaac_ros_dev-aarch64-container:/tmp/models
- ```
-
-8. Inside the container, build and source the workspace:
-
- ```bash
- cd /workspaces/isaac_ros-dev && \
- colcon build --symlink-install && \
- source install/setup.bash
- ```
-
-9. (Optional) Run tests to verify complete and correct installation:
-
- ```bash
- colcon test --executor sequential
- ```
-
-10. Run the following launch files to spin up a demo of this package:
-
- Launch `isaac_ros_dope`:
-
- ```bash
- ros2 launch isaac_ros_dope isaac_ros_dope_tensor_rt.launch.py model_file_path:=/tmp/models/Ketchup.onnx engine_file_path:=/tmp/models/Ketchup.plan
- ```
-
- Then open **another** terminal, and enter the Docker container again:
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src/isaac_ros_common && \
- ./scripts/run_dev.sh
- ```
-
- Then, play the ROS bag:
-
- ```bash
- ros2 bag play -l src/isaac_ros_pose_estimation/resources/rosbags/dope_rosbag/
- ```
-
-11. Open another terminal window and attach to the same container. You should be able to get the poses of the objects in the images through `ros2 topic echo`:
-
- In a **third** terminal, enter the Docker container again:
-
- ```bash
- cd ~/workspaces/isaac_ros-dev/src/isaac_ros_common && \
- ./scripts/run_dev.sh
- ```
-
- ```bash
- ros2 topic echo /poses
- ```
-
- > **Note**: We are echoing `/poses` because we remapped the original topic `/dope/pose_array` to `poses` in the launch file.
-
- Now visualize the pose array in rviz2:
-
- ```bash
- rviz2
- ```
-
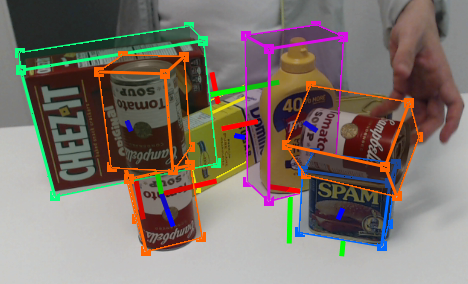
- Then click on the `Add` button, select `By topic` and choose `PoseArray` under `/poses`. Finally, change the display to show an axes by updating `Shape` to be `Axes`, as shown in the screenshot below. Make sure to update the `Fixed Frame` to `camera`.
-
- 
| Input Size
| AGX Orin
| Orin NX
| Orin Nano 8GB
| x86_64 w/ RTX 4060 Ti
|
+|-----------------------------------------------------------------------------------------------------------------------------------------------------------------|-------------------------|---------------------------------------------------------------------------------------------------------------------------------------------------------------|--------------------------------------------------------------------------------------------------------------------------------------------------------------|---------------------------------------------------------------------------------------------------------------------------------------------------------------|----------------------------------------------------------------------------------------------------------------------------------------------------------------|
+| [DOPE Pose Estimation Graph](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/scripts/isaac_ros_dope_graph.py)
| VGA
| [39.8 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dope_graph-agx_orin.json)
33 ms
| [17.3 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dope_graph-orin_nx.json)
120 ms
| –
| [89.2 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_dope_graph-nuc_4060ti.json)
15 ms
|
+| [Centerpose Pose Estimation Graph](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/scripts/isaac_ros_centerpose_graph.py)
| VGA
| [36.1 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-agx_orin.json)
5.7 ms
| [19.4 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-orin_nx.json)
7.4 ms
| [13.8 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-orin_nano.json)
12 ms
| [50.2 fps](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_benchmark/blob/main/results/isaac_ros_centerpose_graph-nuc_4060ti.json)
14 ms
|
-For more context and explanation, see the corresponding outputs in Figure 2 of the CenterPose [paper](https://arxiv.org/pdf/2109.06161.pdf) and refer to the paper.
+---
-## Troubleshooting
+## Documentation
-### Isaac ROS Troubleshooting
+Please visit the [Isaac ROS Documentation](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/index.html) to learn how to use this repository.
-For solutions to problems with Isaac ROS, please check [here](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_common/blob/main/docs/troubleshooting.md).
+---
-### Deep Learning Troubleshooting
+## Packages
-For solutions to problems with using DNN models, please check [here](https://github.com/NVIDIA-ISAAC-ROS/isaac_ros_dnn_inference/blob/main/docs/troubleshooting.md).
+* [`isaac_ros_centerpose`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_centerpose/index.html)
+ * [Quickstart](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_centerpose/index.html#quickstart)
+ * [Troubleshooting](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_centerpose/index.html#troubleshooting)
+ * [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_centerpose/index.html#api)
+* [`isaac_ros_dope`](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html)
+ * [Quickstart](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html#quickstart)
+ * [Try More Examples](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html#try-more-examples)
+ * [Use Different Models](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html#use-different-models)
+ * [Troubleshooting](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html#troubleshooting)
+ * [API](https://nvidia-isaac-ros.github.io/repositories_and_packages/isaac_ros_pose_estimation/isaac_ros_dope/index.html#api)
-## Updates
+## Latest
-| Date | Changes |
-| ---------- | -------------------------------------------------------------------------------------------------------- |
-| 2023-05-25 | Performance improvements |
-| 2023-04-05 | Source available GXF extensions |
-| 2022-06-30 | Update to use NITROS for improved performance and to be compatible with JetPack 5.0.2 |
-| 2022-06-30 | Refactored README, updated launch file & added `nvidia` namespace, dropped Jetson support for CenterPose |
-| 2021-10-20 | Initial update |
+Update 2023-10-18: Adding NITROS CenterPose decoder.
diff --git a/docs/centerpose.md b/docs/centerpose.md
deleted file mode 100644
index 00d31c0..0000000
--- a/docs/centerpose.md
+++ /dev/null
@@ -1,88 +0,0 @@
-# Tutorial for CenterPose Inference using Triton
-
-
