+
+
+
+
+
+
+
+Quick-Info
+What is a LiDAR ?
+LiDAR is a remote sensing technology that uses laser beams to measure
+distances and create detailed 3D maps of objects and environments.
+It stands for Light Detection and Ranging.
+By emitting laser pulses and analyzing the reflected light, LiDAR determines the range, elevation, and spatial
+information of various surfaces and objects.
+Some use cases of LiDAR
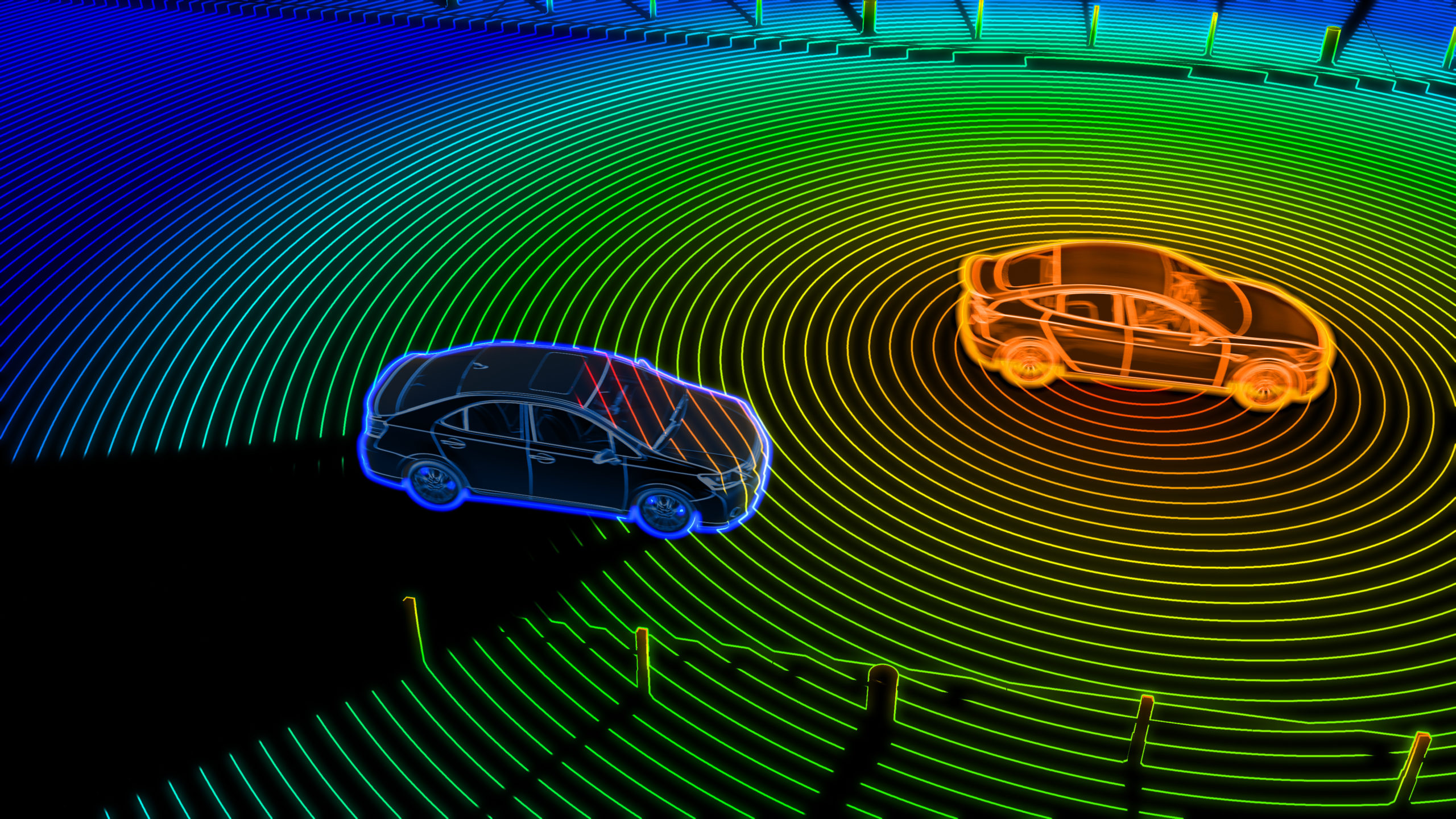
+LiDAR can be used in autonomous robots/vehicules to detect and measure
+the distance to surrounding objects, enabling real-time obstacle avoidance
+and enhancing overall safety.
+
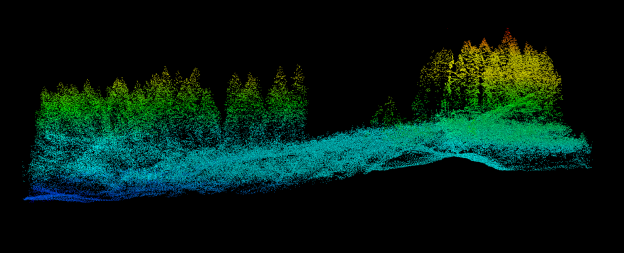
+In forestry applications, LiDAR can help create detailed and
+precise 3D maps of forests, enabling efficient forest management strategies,
+including monitoring tree growth and health, assessing fire risks, and
+optimizing logging operations.
+
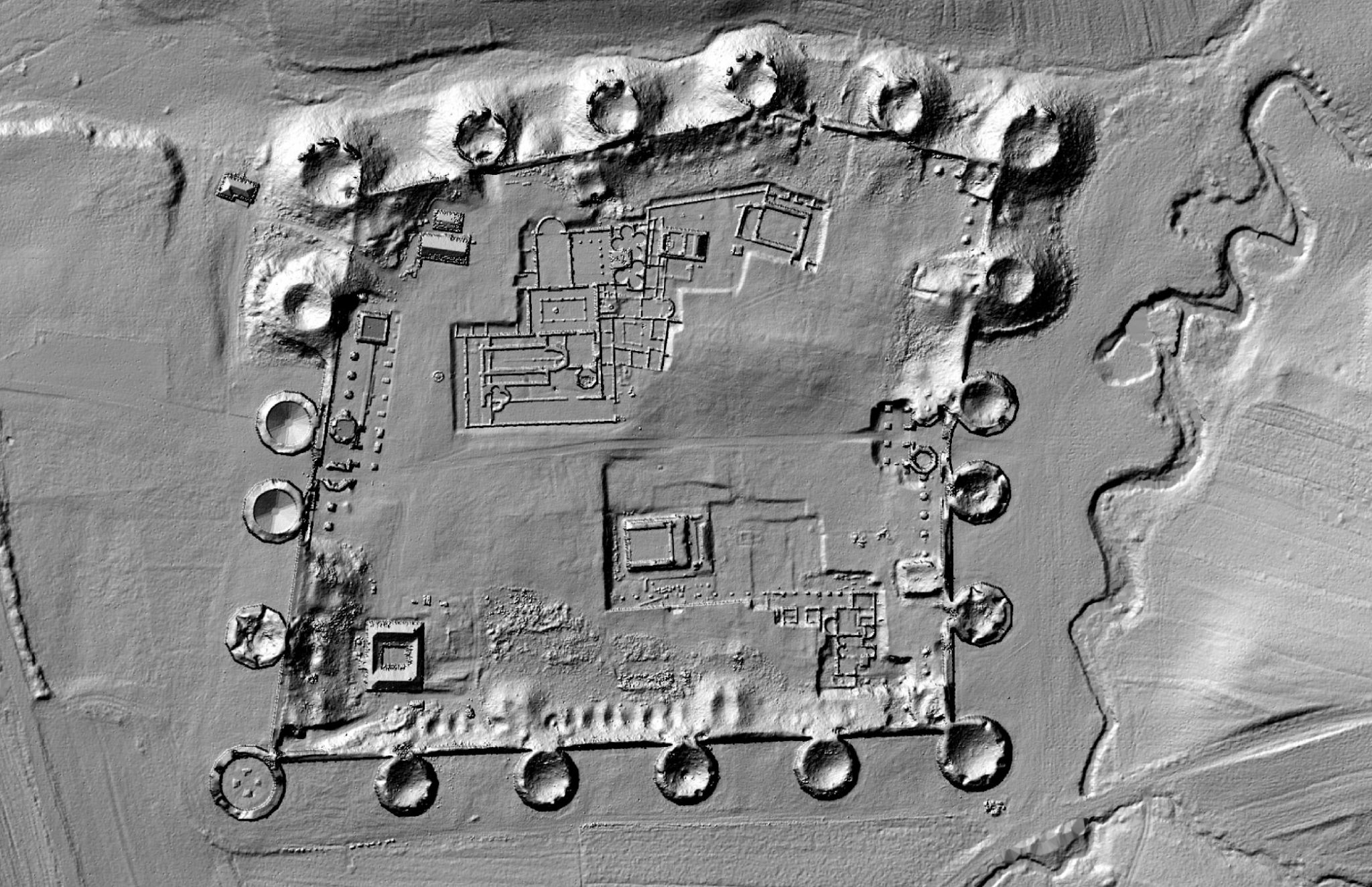
+LiDAR scanning can aid in archaeological excavations, allowing
+researchers to non-invasively create 3D models of sites,
+helping with documentation, preservation, and analysis of cultural heritage,
+artifacts, and structures.
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+
+ 
 +
+ +
+.jpg) +
+.jpg)