You signed in with another tab or window. Reload to refresh your session.You signed out in another tab or window. Reload to refresh your session.You switched accounts on another tab or window. Reload to refresh your session.Dismiss alert
point 4. is giving following messages:
`[ INFO] [1579020498.221108993]: Opened joystick: /dev/input/js0. deadzone_: 0.120000.
[ INFO] [1579020513.311361701, 8.159000000]: Waiting for the move_base action server to come up
[ INFO] [1579020525.572013310, 13.160000000]: Waiting for the move_base action server to come up
[ INFO] [1579020539.021830074, 18.162000000]: Waiting for the move_base action server to come up
[ INFO] [1579020552.466740937, 23.162000000]: Waiting for the move_base action server to come up
[ INFO] [1579020565.903827427, 28.162000000]: Waiting for the move_base action server to come up
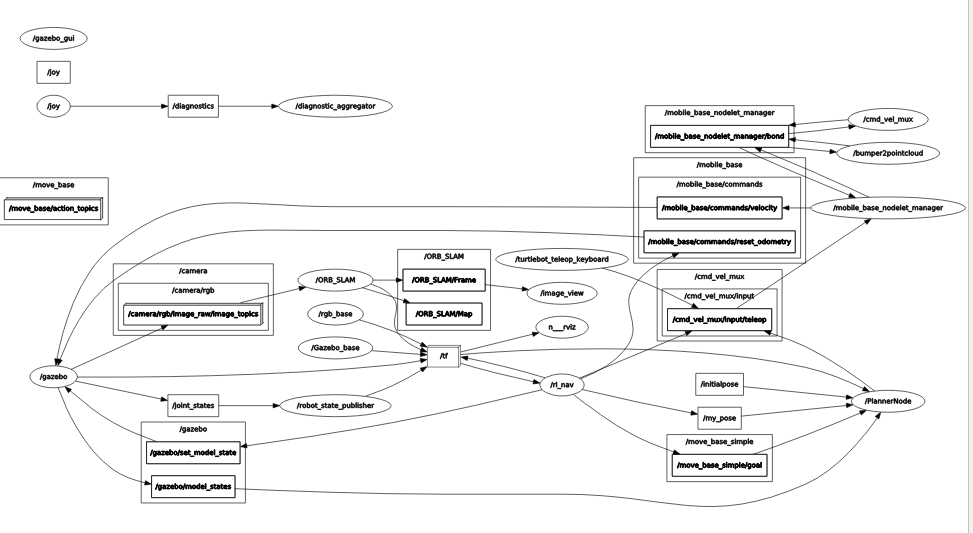
You can check the rqt_graph (attached):
`
There seems to be a problem with PlannerNode.py since every topic that it is publishing is empty.
The text was updated successfully, but these errors were encountered:
Hi! I am trying to test your code but I am facing two problems:
I have run following tools simultaneously:
point 4. is giving following messages:
`[ INFO] [1579020498.221108993]: Opened joystick: /dev/input/js0. deadzone_: 0.120000.
[ INFO] [1579020513.311361701, 8.159000000]: Waiting for the move_base action server to come up
[ INFO] [1579020525.572013310, 13.160000000]: Waiting for the move_base action server to come up
[ INFO] [1579020539.021830074, 18.162000000]: Waiting for the move_base action server to come up
[ INFO] [1579020552.466740937, 23.162000000]: Waiting for the move_base action server to come up
[ INFO] [1579020565.903827427, 28.162000000]: Waiting for the move_base action server to come up
You can check the rqt_graph (attached):
`
There seems to be a problem with PlannerNode.py since every topic that it is publishing is empty.
The text was updated successfully, but these errors were encountered: