原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
[TOC]
GAMP 全称 (GNSS Analysis software for Multi-constellation and multi-frequency Precise positioning),在 RTKLIB 的基础上,将一些多余的函数、代码简洁化,精简出后处理 PPP 部分,并对算法进行改进增强。简化后代码比 RTKLIB 原版还要简单,对初学者非常友好,在我接触过的导航定位开源程序中算是最简单的。使用也很方便,软件包里提供了 VS 工程,和组织好的配置文件、数据文件;设置好 pthreads 库,简单改改文件路径就能算出结果。
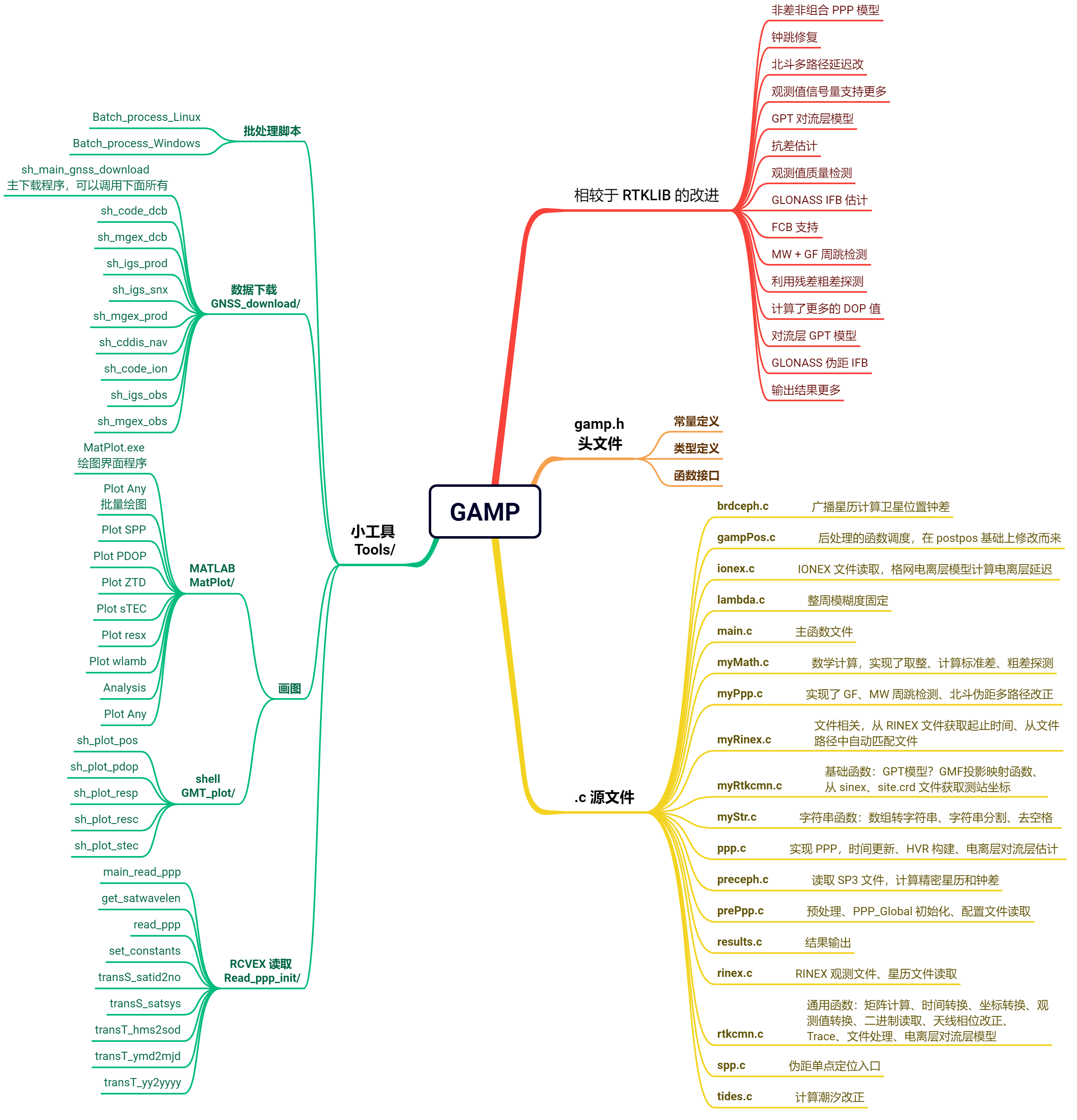

- 非差非组合的 PPP 模型
- 钟跳修复
- 北斗多路径延迟改正
- 观测值信号量支持更多
- 抗差估计
- 伪距观测值质量检测
- MW + GF 周跳检测
- 利用残差粗差探测
- 计算了更多的 DOP 值
- 对流层 GPT 模型
- GLONASS 伪距 IFB
- 输出结果更多
- GPT对流层模型

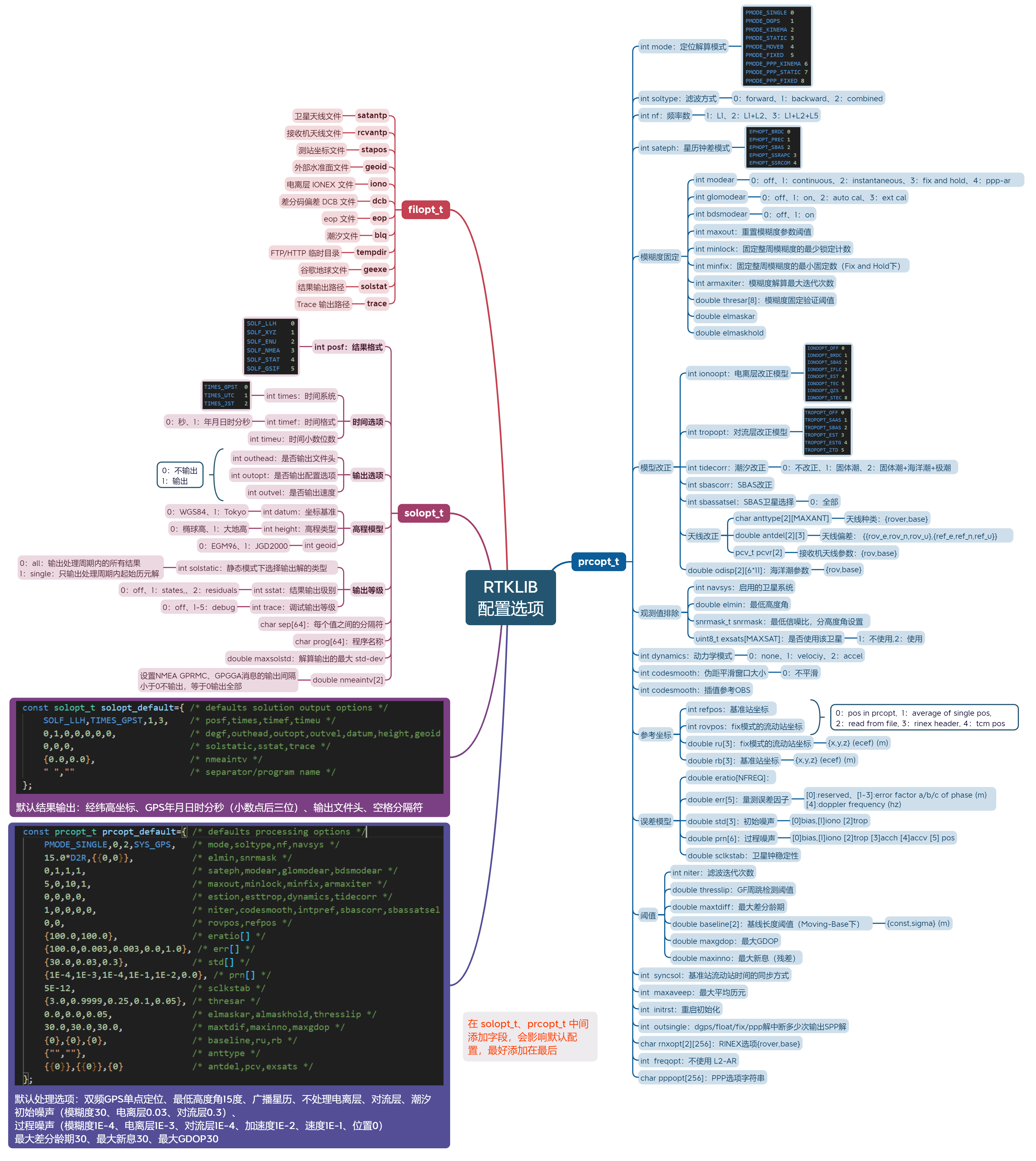
根据配置文件的注释,在示例配置文件基础上修改即可。
- obs file/folder:观测文件/文件夹路径;如果填 0 需要指定观测文件绝对路径,如果填 1 需要指定包含所有解算用的文件的文件绝对路径。
- start_time、end_time:解算起止时间,填 0 表示全部解算。
- posmode:定位模式,支持三种:SPP、static PPP、kinematic PPP。
- soltype:滤波模式:0 正向、1 反向、2 正方向结合
- navsys:卫星系统,用 7 为二进制码表示:1 GPS、4 GLONASS、8 Galileo、16 QZSS、32 BDS;比如使用 BDS、GPS 要填 33。
- gnsisb:ISB 噪声模型:1 常值、2 精确先验常值、3 随机游走、4 白噪声。
- gloicb:GLONASS 伪距 IFB 模型:0 忽略、1 线性模型、2 二次多项式模型、3 估计每颗卫星、4 估计每个频率。
- minelev:卫星截止高度角,默认 10。
- maxout:重置模糊度的最低停测段数,默认 3。
- sampleprc:截止观测值,默认 0。
- inpfrq:频率选择:1 单频或者消电离层 PPP、2 双频非差非组合 PPP
- ionoopt:电离层处理选项:0 不处理、1 广播星历克罗布歇模型、2 消电离层、3 单频估计、4 双频估计、5 电离层格网模型。
- ionopnoise:估计电离层随机模型:0 静态、1 随机游走、2 新随机游走、3 白噪声。
- ionoconstraint:增加电离层的虚拟观测参数及其对观测方程的相应约束:0 关闭、1 打开。
- troopt:对流层处理选项:0 不处理、1 Saastamoninen 模型、2 SBAS 模型、3 估计 ZTD、估计 ZTD 格网。
- tropmf:对流层投影映射函数:0 NMF、1 GMF。
- tidecorr:潮汐改正模式,与卫星系统类似用 3 位二进制码表示:1 固体潮、2 海洋潮、3 极潮,如果想全部改正就设置为 7。
- cycleslip_GF:是否开启 GF 周跳检测:0 关闭、1 打开。
- cycleslip_MW:是否开启 MW 周跳检测:0 关闭、1 打开。
- errratio(P/L GPS)、errratio(P/L GLO)、errratio(P/L BDS)、errratio(P/L GAL)、errratio(P/L QZS):伪距和载波位观测值误差的比率,默认100。
- errmeas(L):载波相位观测值精度,默认 0.003 m。
- prcNoise(AMB):估计模糊度参数的观测噪声。
- prcNoise(ZTD):估计 ZTD 参数的观测噪声。
- prcNoise(ION):估计 ION 参数的观测噪声。
- prcNoise(ION_GF):估计 ION_GF 参数的观测噪声。
- outdir:结果输出文件夹,当前工作目录的子文件夹。
- output:设置输出哪些结果,0 不输出、1 输出,包括:
- pos、debug、pdop、elev、dtrp、ifamb、wlamb_no、wlamb_yes、gf、amb_cs、resc1、resc2、resc3、resp1、resp2、resp3、stec、isb、ibm、ifb、ippp
大部分沿用 RTKLIB,做了少量拓展

大部分沿用 RTKLIB,做了少量拓展

除此以为 GAMP 还新加入了:
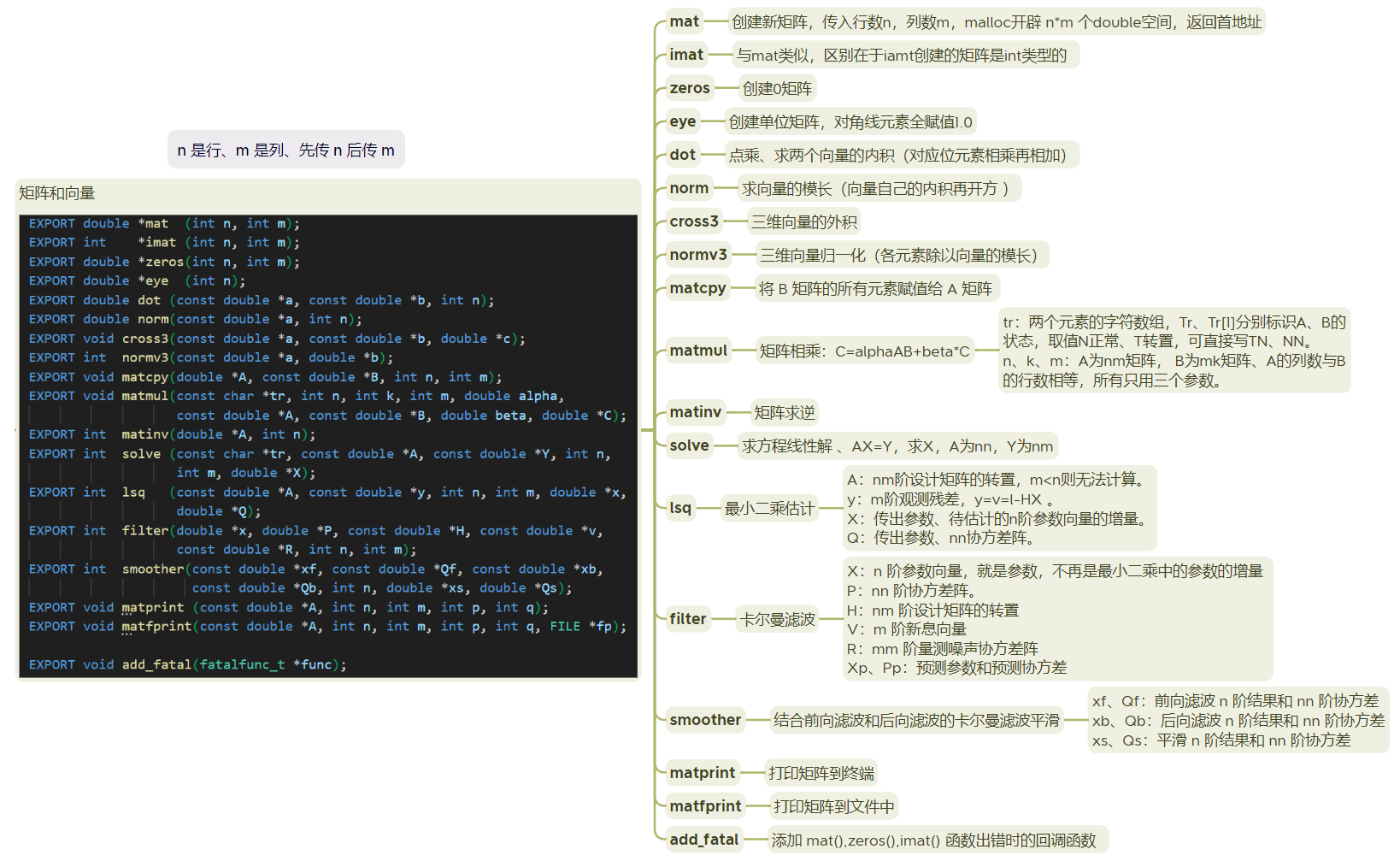
- GAMP 中用 double 类型一维数组表示矩阵,不能自动识别矩阵的行列数,每次传矩阵的时候都要传入行数 n、列数 m。
- 用矩阵的时候要先 malloc 开辟空间,用完记得 free 释放空间。
- 要能熟练计算矩阵加减乘除转置。
- 矩阵求逆用的 LU 分解法,时间复杂度
$O^3$ ,对于大规模的矩阵,如果利用矩阵的稀疏性和对称性等特性,而且当使用不完全分解方法(例如,只计算到一定程度或使用截断技术)时,LU 分解的效率会更高。 -
matprint()很常用,调试的时候不好直接看的矩阵元素的值,得输出到终端或者文件再看。
- GAMP 中时间一般都以
gtime_t类型存储,为了提高时间表示的精度,分开存 GPST 时间的整秒数和不足一秒的部分。 - 经常需要做年月日时分秒、周+周内秒、GPST 三种时间之间的转换;想输出北京时间的时候要加 8 小时。
- BDT、GLONASST 不怎么用,读完文件就转为 GPS 时间了。
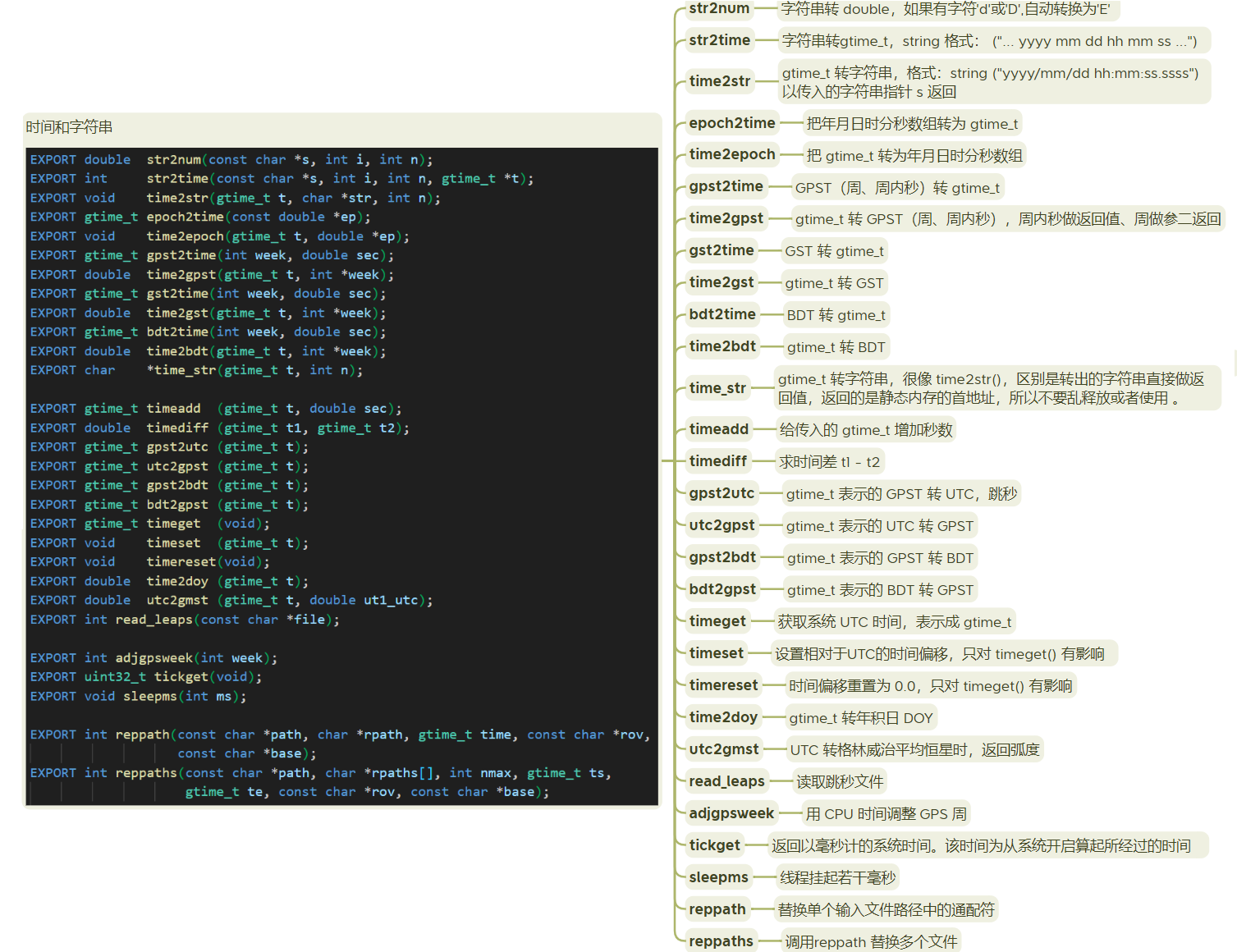
- ECI 用的很少,只在
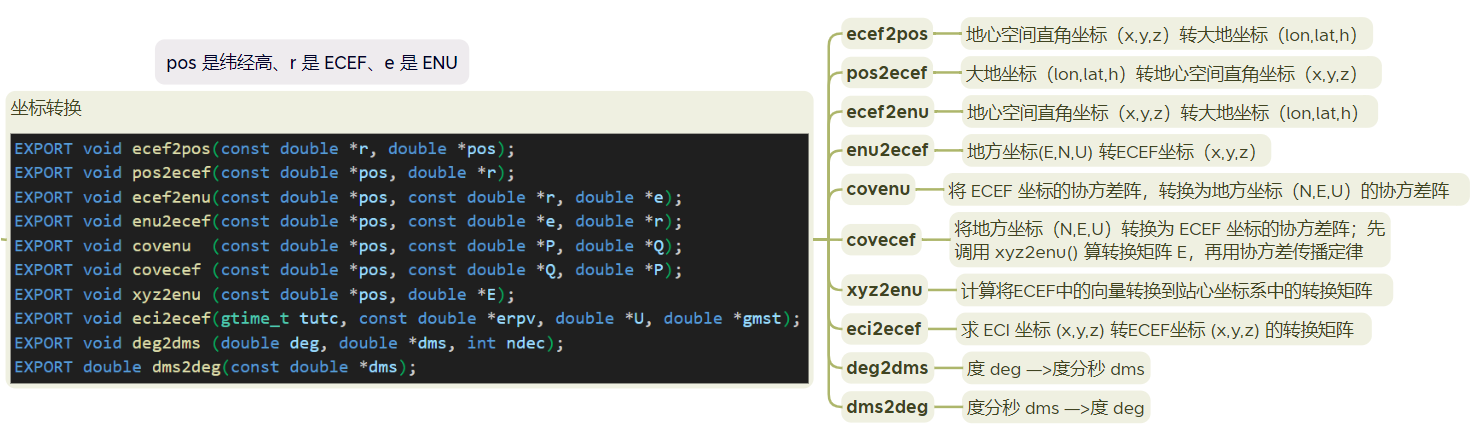
sunmoonpos()函数中计算日月坐标的时候用到了,不用太关注。 - ENU、ECEF、LLH 三套坐标系都频繁使用,要熟练掌握他们直接的转换,包括协方差的转换。
- ENU 是局部相对坐标系,以某一个 LLH 坐标为原点,坐标转换的时候要传入这个 LLH 坐标。
- ENU 常用
e表示、ECEF 常用r表示、LLH 常用pos表示。
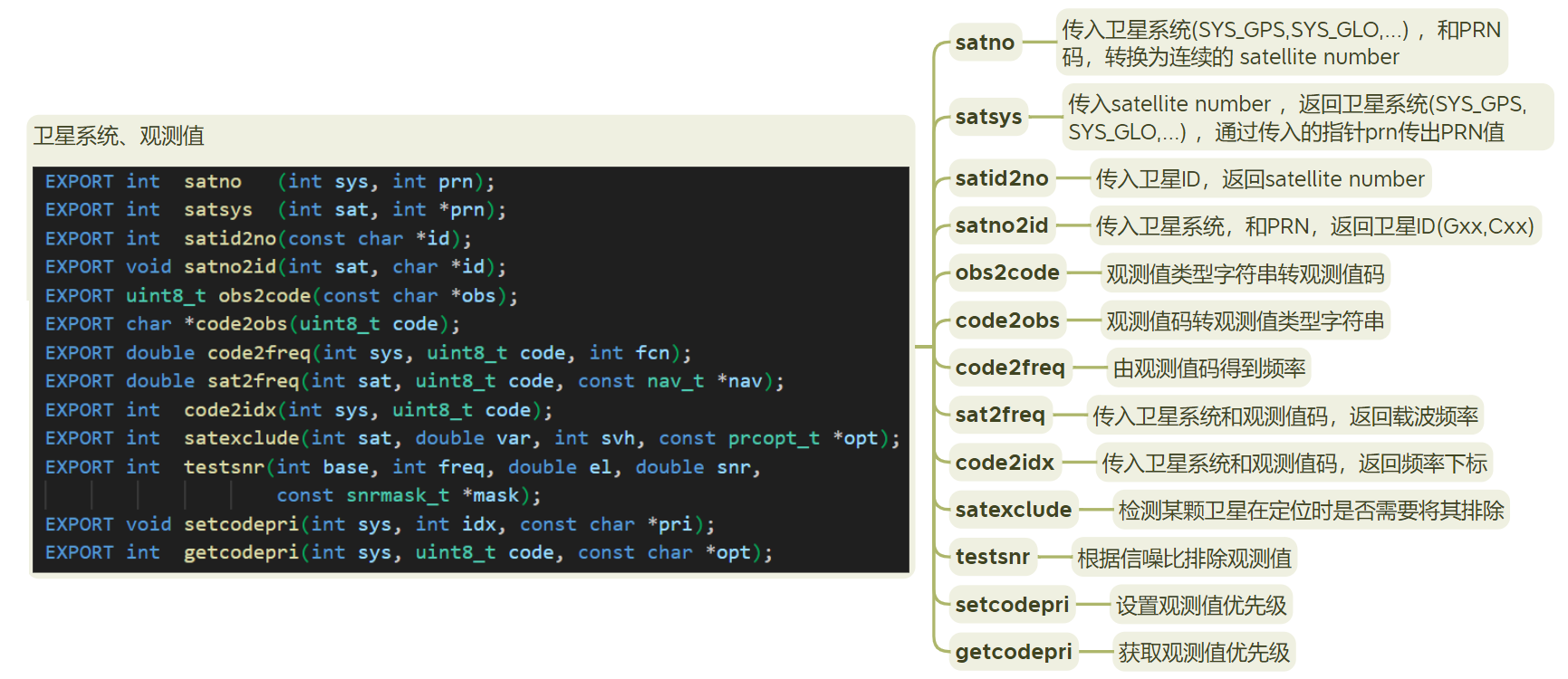
- 卫星系统表示:
- 表示卫星系统的字母:GRECJIS。
- 7 位二进制码表示,对应位写 1 表示有对应的系统,做与运算可加系统。
- 卫星的表示:
- 可以表示为各系统的卫星ID(系统缩写+PRN):B02、C21。
- 也可表示为连续的 satellite number。
- 观测值类型:
- C:伪距、D:多普勒、L:载波相位、S:载噪比。
CODE_XXX:观测值类型定义,用一串连续的数字表示。sigind_t:表示每种卫星系统的载波类型和观测值类型 ,每种类型的系统其实对应的就是一个sigind_t结构体。
程序从 main.c 的 main() 函数开始执行,整个程序都在 t1=clock() 和 t2=clock() 中执行,求得t2-t1为程序执行时间。main() 函数接收传入的命令行参数即 gamp.cfg 的文件路径,如果传入了参数,调用 proccfgfile() 进行下一步处理。
- VS 中:在 项目属性-调试-命令行参数 中指定命令行参数。
- Windows 的文件路径中一般用
\,且为了避免转义需要写成\\。linux一般用/。
int main(int argc, char **argv)
{
//char cfgfile[1000]="C:\\mannual_GAMP\\Examples\\2017244\\gamp.cfg";
char *cfgfile;
long t1,t2;
t1=clock();
if (argc==1) {
printf("\n * The input command-line parameter indicating configure file is lost, please check it!\n");
return 0;
}
else {
cfgfile=argv[1];
}
// 调用 proccfgfile() 处理配置文件
/* find processing configure file */
proccfgfile(cfgfile);
t2=clock();
printf("\n * The total time for running the program: %6.3f seconds\n%c",(double)(t2-t1)/CLOCKS_PER_SEC,'\0');
//printf("Press any key to exit!\n");
//getchar();
return 0;
}
proccfgfile() 函数先将 PPP_Glo 结构体初始化,将处理方式,输入输出文件路径赋空值。打开传入的 gamp.cfg 文件,获取观测值文件路径和处理方式,根据观测文件的数量调用对应的函数:
- 单个观测文件调用
procOneFile()进行下一步处理; - 如果有多个文件调用
batchProc()进行批量处理,batchProc()会打开文件夹,循环查找文件夹中的观测值O文件,调用procOneFile()进行下一步处理。
观测值
O文件的后缀有两种,一种是直接.O结尾,一种是.ddO结尾,dd表示年份后两位。
static int proccfgfile(char cfgfile[])
{
FILE *fp=NULL;
char *p,tmp[MAXSTRPATH]={'\0'};
// 将 PPP_Glo 结构体初始化,将处理方式、输入输出文件路径赋空值
//initialization
PPP_Glo.prcType=-1;
PPP_Glo.outFolder[0]='\0';
PPP_Glo.inputPath[0]='\0';
// 打开传入的 gamp.cfg 配置文件
if ((fp=fopen(cfgfile,"r"))==NULL) {
printf("*** ERROR: open configure file failed, please check it!\n");
return 0;
}
while (!feof(fp)) {
tmp[0]='\0';
fgets(tmp,MAXSTRPATH,fp);
if ((tmp!=NULL)&&(tmp[0]=='#')) continue;
// 获取观测值文件路径和处理方式
if (strstr(tmp,"obs file/folder")) {
p=strrchr(tmp,'=');
sscanf(p+1,"%d",&PPP_Glo.prcType);
tmp[0]='\0';
if (fgets(tmp,MAXSTRPATH,fp)) {
p=strrchr(tmp,'=');
sscanf(p+1,"%[^,]",PPP_Glo.inputPath);
// 调用 trimSpace() 去除空格,调用 cutFilePathSep() 去除文件末尾的 /
trimSpace(PPP_Glo.inputPath);
cutFilePathSep(PPP_Glo.inputPath);
}
else {
printf("*** ERROR: read obs files path error!");
return 0;
}
break;
}
}
fclose(fp);
if (PPP_Glo.prcType<0||PPP_Glo.prcType>2) {
printf("*** ERROR: read obs files path error!");
return 0;
}
if (PPP_Glo.prcType==0) // 单个观测文件调用 procOneFile() 进行下一步处理
procOneFile(PPP_Glo.inputPath,cfgfile,0,1);
else if (PPP_Glo.prcType==1) // 多个文件调用 batchProc() 进行批量处理
batchProc(PPP_Glo.inputPath,cfgfile);
return 1;
}
-
先调用
preProc()预处理:通过调用initGlobal()初始化PPP_Glo结构体;调用getObsInfo()读取观测O文件的一部分,获取起止时间、文件版本、天线种类等基础信息;为filopt.inf、filopt.outf开辟内存空间。 -
调用
readcfgFile()读取整个配置文件,通过strstr(line,"start_time")匹配处理选项,存储到prcOpt_Ex、prcopt。 -
调用
getFopt_auto(),通过调用findClkFile()、findNavFile(),根据后缀名自动查找各种 PPP 解算所需的文件,将文件路径存到fopt->inf中。 -
调用
gampPos()进行下一步处理;处理结束,调用postProc()释放filopt.inf、filopt.outf内存空间。
extern void procOneFile(char file[], char cfgfile[], int iT, int iN)
{
procparam_t pparam;
gtime_t t={0},ts=t,te=t ;
long t1,t2;
t1=clock();
// 先调用 preProc() 预处理:
// 其通过调用 initGlobal() 初始化 PPP_Glo 结构体
// 调用 getObsInfo() 读取观测O文件的一部分,获取起止时间、文件版本、天线种类等基础信息
// 为 filopt.inf、filopt.outf 开辟内存空间
preProc(file,&pparam,&ts,&te);
printf(" * Processing the %dth", iN);
if (iT>0) printf("/%d", iT);
printf(" ofile: %s\n", PPP_Glo.ofileName_ful);
// 调用 readcfgFile() 读取整个配置文件,通过 strstr(line,"start_time") 匹配处理选项,存储到 prcOpt_Ex、prcopt
//read configure file
readcfgFile(cfgfile,&pparam.prcopt,&pparam.solopt,&pparam.filopt);
//single-, dual- or triple-frequency?
if (pparam.prcopt.ionoopt==IONOOPT_IF12||pparam.prcopt.ionoopt==IONOOPT_UC1) {
if (pparam.prcopt.nf!=1) {
printf("*** ERROR: Number of frequencies Error! Please set inpfrq=1.\n");
return;
}
}
if (pparam.prcopt.ionoopt==IONOOPT_UC12) {
if (pparam.prcopt.nf!=2) {
printf("*** ERROR: Number of frequencies Error! Please set inpfrq=2.\n");
return;
}
}
//processing time set
if (!PPP_Glo.prcOpt_Ex.bTsSet) PPP_Glo.prcOpt_Ex.ts=ts;
else if (timediff(ts,PPP_Glo.prcOpt_Ex.ts)>0) PPP_Glo.prcOpt_Ex.ts=ts;
if (!PPP_Glo.prcOpt_Ex.bTeSet) PPP_Glo.prcOpt_Ex.te=te;
else if (timediff(te,PPP_Glo.prcOpt_Ex.te)<0) PPP_Glo.prcOpt_Ex.te=te;
// 调用 getFopt_auto() ,通过调用 findClkFile()、findNavFile(),根据后缀名自动查找各种 PPP 解算所需的文件,将文件路径存到 fopt->inf 中
//automatically matches the corresponding files
getFopt_auto(file,PPP_Glo.obsDir,ts,te,pparam.prcopt,pparam.solopt,&pparam.filopt);
// 调用 gampPos() 进行下一步处理
// post processing positioning
gampPos(PPP_Glo.prcOpt_Ex.ts, PPP_Glo.prcOpt_Ex.te, 0.0, 0.0,
&pparam.prcopt,&pparam.solopt,&pparam.filopt);
// 调用 postProc() 释放 filopt.inf、filopt.outf 内存空间
postProc(pparam);
t2=clock();
sprintf(PPP_Glo.chMsg," * The program runs for %6.3f seconds\n%c",(double)(t2-t1)/CLOCKS_PER_SEC,'\0');
outDebug(OUTWIN,OUTFIL,0);
printf("/***************************** OK *****************************/\n\n\n");
if (PPP_Glo.outFp[OFILE_DEBUG]) {
fclose(PPP_Glo.outFp[OFILE_DEBUG]);
PPP_Glo.outFp[OFILE_DEBUG]=NULL;
}
}
-
先调用
outhead()输出结果文件的文件头。 -
调用
setcodepri()设置观测值优先级。 -
调用
readdcb()、readobsnav()、readpreceph()等函数读取文件。 -
文件读取完之后,调用
execses()进行下一步处理。 -
处理完之后调用
freeobsnav()、freepreceph()释放内存空间。
extern int gampPos(gtime_t ts, gtime_t te, double ti, double tu, prcopt_t *popt,
const solopt_t *sopt, filopt_t *fopt)
{
int i,j,stat=0,index[MAXINFILE]={0};
// 先调用 outhead() 写输出文件的文件头
/* write header to output file */
if (!outhead(fopt->outf,popt,sopt,PPP_Glo.outFp,MAXOUTFILE))
return 0;
for (i=0;i<MAXOUTFILE;i++) {
if (fopt->outf[i]&&strlen(fopt->outf[i])>2)
PPP_Glo.outFp[i]=openfile(fopt->outf[i]);
else
PPP_Glo.outFp[i]=NULL;
}
// 调用 setcodepri() 设置观测值优先级
/* set rinex code priority for precise clock */
if (PMODE_PPP_KINEMA<=popt->mode)
setcodepri(SYS_GPS,1,popt->sateph==EPHOPT_PREC?"PYWC":"CPYW");
// 调用 readdcb()、readobsnav()、readpreceph() 等函数读取文件
/* read satellite antenna parameters */
if (*fopt->antf&&!(readpcv(fopt->antf,&pcvss))) {
printf("*** ERROR: no sat ant pcv in %s\n",fopt->antf);
return -1;
}
/* read dcb parameters */
for (i=0;i<MAXSAT;i++) for (j=0;j<3;j++) {
navs.cbias[i][j]=0.0;
}
if (*fopt->p1p2dcbf)
readdcb(fopt->p1p2dcbf,&navs);
if (*fopt->p1c1dcbf)
readdcb(fopt->p1c1dcbf,&navs);
if (*fopt->p2c2dcbf)
readdcb(fopt->p2c2dcbf,&navs);
if (*fopt->mgexdcbf&&(popt->navsys&SYS_CMP||popt->navsys&SYS_GAL))
readdcb_mgex(fopt->mgexdcbf,&navs,PPP_Glo.prcOpt_Ex.ts);
/* read erp data */
if (*fopt->eopf) {
if (!readerp(fopt->eopf,&navs.erp)) {
printf("ERROR: no erp data %s\n",fopt->eopf);
}
}
/* read ionosphere data file */
if (*fopt->ionf&&(popt->ionoopt==IONOOPT_TEC||((popt->ionoopt==IONOOPT_UC1||popt->ionoopt==IONOOPT_UC12)&&
PPP_Glo.prcOpt_Ex.ion_const)))
readtec(fopt->ionf,&navs,1);
for (i=0;i<MAXINFILE;i++) index[i]=i;
/* read prec ephemeris */
readpreceph(fopt->inf,MAXINFILE,popt,&navs);
/* read obs and nav data */
if (!readobsnav(ts,te,ti,fopt->inf,index,MAXINFILE,popt,&obss,&navs,stas)) {
freeobsnav(&obss,&navs);
return 0;
}
if (PPP_Glo.nEpoch<=1) {
strcpy(PPP_Glo.chMsg,"PPP_Glo.nEpoch<=1!\n\0");
printf("%s",PPP_Glo.chMsg);
freeobsnav(&obss,&navs);
return 0;
}
//read igs antex only once, and save the elements in 'pcvss'
/* set antenna paramters */
setpcv(obss.data[0].time,popt,&navs,&pcvss,&pcvss,stas);
/* read ocean tide loading parameters */
if (popt->mode>PMODE_SINGLE&&fopt->blqf) {
readotl(popt,fopt->blqf,stas);
}
// 调用 execses() 进行下一步处理
//next processing
stat=execses(popt,sopt,fopt);
// 处理完之后调用调用 freeobsnav()、freepreceph() 释放内存空间
/* free obs and nav data */
freeobsnav(&obss,&navs);
/* free prec ephemeris and sbas data */
freepreceph(&navs);
/* free antenna parameters */
if (pcvss.pcv) {free(pcvss.pcv); pcvss.pcv=NULL; pcvss.n=pcvss.nmax=0;}
if (pcvsr.pcv) {free(pcvsr.pcv); pcvsr.pcv=NULL; pcvsr.n=pcvsr.nmax=0;}
/* free erp data */
if (navs.erp.data) {free(navs.erp.data); navs.erp.data=NULL; navs.erp.n=navs.erp.nmax=0;}
if (PPP_Glo.outFp[OFILE_IPPP]) fprintf(PPP_Glo.outFp[OFILE_IPPP],"-PPP_BLOCK\n");
for (i=0;i<MAXOUTFILE;i++) {
if (i==OFILE_DEBUG) continue;
if (PPP_Glo.outFp[i]) {
fclose(PPP_Glo.outFp[i]);
PPP_Glo.outFp[i]=NULL;
}
}
return stat;
}如果输入的观测数据在同一频率内包含多个信号,GAMP 将按照以下默认优先级选择一个信号进行处理。
static char codepris[7][MAXFREQ][16]={ /* code priority table */
/* L1/E1 L2/B1 L5/E5a/L3 L6/LEX/B3 E5b/B2 E5(a+b) S */
{"CPYWMNSL","PYWCMNDSLX","IQX" ,"" ,"" ,"" ,"" }, /* GPS */
{"PC" ,"PC" ,"IQX" ,"" ,"" ,"" ,"" }, /* GLO */
{"CABXZ" ,"" ,"IQX" ,"ABCXZ" ,"IQX" ,"IQX" ,"" }, /* GAL */
{"CSLXZ" ,"SLX" ,"IQX" ,"SLX" ,"" ,"" ,"" }, /* QZS */
{"C" ,"" ,"IQX" ,"" ,"" ,"" ,"" }, /* SBS */
{"IQX" ,"IQX" ,"IQX" ,"IQX" ,"IQX" ,"" ,"" }, /* BDS */
{"" ,"" ,"ABCX" ,"" ,"" ,"" ,"ABCX"} /* IRN */
};用 setcodepri(),可改变优先级顺序:
extern void setcodepri(int sys, int freq, const char *pri)
{
if (freq<=0||MAXFREQ<freq) return;
if (sys&SYS_GPS) strcpy(codepris[0][freq-1],pri);
if (sys&SYS_GLO) strcpy(codepris[1][freq-1],pri);
if (sys&SYS_GAL) strcpy(codepris[2][freq-1],pri);
if (sys&SYS_QZS) strcpy(codepris[3][freq-1],pri);
if (sys&SYS_SBS) strcpy(codepris[4][freq-1],pri);
if (sys&SYS_CMP) strcpy(codepris[5][freq-1],pri);
if (sys&SYS_IRN) strcpy(codepris[6][freq-1],pri);
}代码都被注释了,就只是创建文件,需要输出得手动改这个文件:
static int outhead(char **outfile, const prcopt_t *popt, const solopt_t *sopt, FILE* fp[], int sum)
{
int i;
for (i=0; i<sum; i++) {
if (!outfile[i]||strlen(outfile[i])<=4) continue;
createdir((const char *)outfile[i]);
if (!(fp[i]=fopen(outfile[i],"w"))) {
printf("error : open output file %s",outfile[i]);
return 0;
}
switch (i) {
case 0:
//outsolhead(fp[0],sopt);
break;
case 1:
//outCsInfoHead(fp[1],sopt);
break;
case 2:
//outResiHead(fp[2],popt,sopt);
break;
case 3:
//outResiHead(fp[3],popt,sopt);
break;
case 4:
//outResiHead(fp[4],popt,sopt);
break;
case 5:
//outAllAmbHead(fp[5],sopt,12);
break;
case 6:
//outAllAmbHead(fp[6],sopt,7);
break;
case 7:
//outAllAmbHead(fp[7],sopt,7);
break;
case 8:
//outAllAmbHead(fp[8],sopt,7);
break;
case 9:
//outAllAmbHead(fp[9],sopt,7);
break;
//case 10:
// outallambhead(fp[10],sopt,7);
// break;
//case 11:
// outallambhead(fp[11],sopt,12);
// break;
}
fclose(fp[i]);
}
return 1;
}
- 先调用
sampledetermine()获取观测值采用间隔(解算频率)。 - 调用
calCsThres()获取根据采样频率周跳检测的阈值,调用rtkinit()初始化rtk结构体。 - 调用
procpos()进行下一步处理。 - 处理完之后调用
rtkfree()释放rtk结构体。
static int execses(prcopt_t *popt, const solopt_t *sopt, filopt_t *fopt)
{
rtk_t rtk;
// 先调用 sampledetermine() 获取观测值采用间隔(解算频率),周跳检测会用到
//to determine the thresh values for cycle slip detection
PPP_Glo.sample=sampledetermine(popt);
// 调用 calCsThres() 获取周跳检测的阈值
if (fabs(PPP_Glo.prcOpt_Ex.csThresGF)<0.01||fabs(PPP_Glo.prcOpt_Ex.csThresMW)<0.01)
calCsThres(popt,PPP_Glo.sample);
// 调用 rtkinit() 初始化 rtk 结构体
rtkinit(&rtk,popt);
if (PPP_Glo.outFp[OFILE_IPPP]) outiPppHead(PPP_Glo.outFp[OFILE_IPPP],rtk);
// 根据前向滤波、后向滤波、前后向结合,以不同的方式调用 procpos() 进行下一步处理
if (popt->soltype==0) { /* forward */
PPP_Glo.revs=0;
PPP_Glo.iObsu=0;
PPP_Glo.iEpoch=0;
procpos(&rtk,popt,sopt,0);
}
else if (popt->soltype==1) { /* backward */
PPP_Glo.revs=1;
PPP_Glo.iObsu=obss.n-1;
PPP_Glo.iEpoch=PPP_Glo.nEpoch;
procpos(&rtk,popt,sopt,0);
}
else { /* combined */
PPP_Glo.solf=(sol_t *)malloc(sizeof(sol_t)*PPP_Glo.nEpoch);
PPP_Glo.solb=(sol_t *)malloc(sizeof(sol_t)*PPP_Glo.nEpoch);
if (PPP_Glo.solf&&PPP_Glo.solb) {
}
else
printf("error : memory allocation");
free(PPP_Glo.solf); PPP_Glo.solf=NULL;
free(PPP_Glo.solb); PPP_Glo.solb=NULL;
}
// 处理完之后调用 rtkfree() 释放 rtk 结构体
rtkfree(&rtk);
return 0;
}-
观测值少于 MINNUM,直接返回 30。
-
获取观测值时间序列
gt。 -
遍历 MINNUM 个数据,获取采样间隔序列
dt、和这个采样间隔出现的次数序列it。 -
找出出现次数最多的采样间隔下标
m,返回出现次数最多的采样间隔dt[m]。
static double sampledetermine(const prcopt_t *popt)
{
obsd_t obs[MAXOBS];
int i,j,nobs,n,m,it[MINNUM];
gtime_t gt[MINNUM+1];
double dt[MINNUM],dtmp;
j=0;
PPP_Glo.iObsu=PPP_Glo.revs=PPP_Glo.iEpoch=0;
// 获取观测值时间序列 gt
//MINNUM=30
while ((nobs=inputobs(obs,obss,PPP_Glo.revs,&PPP_Glo.iObsu,&PPP_Glo.iEpoch))>=0) {
gt[j++]=obs[0].time;
if (j>MINNUM) break;
}
PPP_Glo.iObsu=PPP_Glo.revs=PPP_Glo.iEpoch=0;
// 观测值少于 MINNUM,直接返回 30
if (j<=MINNUM) {
sprintf(PPP_Glo.chMsg,"*** WARNING: the number of epochs is less than %d.\n",MINNUM);
outDebug(OUTWIN,OUTFIL,0);
return 30.0;
}
for (i=0;i<MINNUM;i++) {
dt[i]=0.0;
it[i]=0;
}
// 求前两个数据时间差
dt[0]=timediff(gt[1],gt[0]);
it[0]=1;
n=1;
// 遍历 MINNUM 个数据,获取采样间隔序列 dt、和这个采样间隔出现的次数序列 it
for (i=0;i<MINNUM;i++) {
dtmp=timediff(gt[i+1],gt[i]);
// 寻找与这个采样间隔接近的值,如果找到了,就增加对应的 it 的值;
// 如果没有找到,就在 dt 中添加这个采样间隔,并将对应的 it 设为1
for (j=0;j<n;j++) {
if (fabs(dtmp-dt[j])<1.0e-8) {
it[j]++;
break;
}
}
if (j==n) {
dt[n]=dtmp;
it[n++]=1;
}
}
// 找出出现次数最多的采样间隔下标 m
for (i=j=m=0;i<MINNUM;i++) {
if (j<it[i]) {
j=it[i];
m=i;
}
}
if (3*j>=MINNUM) {
return dt[m];
}
else {
for (i=0;i<n;i++) {
sprintf(PPP_Glo.chMsg,"Sample is %6.2f\n",dt[i]);
outDebug(OUTWIN,0,0);
}
strcpy(PPP_Glo.chMsg,"*** ERROR: sampling may be inaccurate!\n");
outDebug(OUTWIN,0,0);
}
// 返回出现次数最多的采样间隔 dt[m]
return dt[m];
}联合使用 Geometry-free (GF) 和 MW 组合观测值进行非差周跳探测,其充分利用了双频观测值线性组合的特点。GF 和 MW 组合观测值分别为:
$$
\begin{array}{c}
L_{\mathrm{GF}}(i)=\lambda_{1} \Phi_{1}(i)-\lambda_{2} \Phi_{2}(i)=\left(\gamma_{2}-1\right) I_{1}(i)+\left(\lambda_{1} N_{1}-\lambda_{2} N_{2}\right) \
\left{\begin{array}{l}
\lambda_{\delta} \Phi_{\delta}(i)=\left(f_{1} \lambda_{1} \Phi_{1}(i)-f_{2} \lambda_{2} \Phi_{2}(i)\right) /\left(f_{1}-f_{2}\right)=\rho(i)+f_{1} f_{2} /\left(f_{1}^{2}-f_{2}^{2}\right) \cdot I_{1}(i)+\lambda_{\delta} N_{\delta} \
P_{\delta}(i)=\left(f_{1} P_{1}(i)+f_{2} P_{2}(i)\right) /\left(f_{1}+f_{2}\right)=\rho(i)+f_{1} f_{2} /\left(f_{1}^{2}-f_{2}^{2}\right) \cdot I_{1}(i) \
N_{\delta}=N_{1}-N_{2}=\Phi_{\delta}(i)-P_{\delta}(i) / \lambda_{\delta} \
\lambda_{\delta}=c /\left(f_{1}-f_{2}\right)
\end{array}\right.
\end{array}
$$
式中,$i$ 表示观测历元号;
extern int calCsThres(prcopt_t *opt, const double sample)
{
int b=0;
if (sample>0.0) {
if (PPP_Glo.prcOpt_Ex.bUsed_gfCs==1&&fabs(PPP_Glo.prcOpt_Ex.csThresGF)<0.01) {
if (sample<=1.0) PPP_Glo.prcOpt_Ex.csThresGF=0.05;
else if (sample<=20.0) PPP_Glo.prcOpt_Ex.csThresGF=(0.10)/(20.0-0.0)*sample+0.05;
else if (sample<=60.0) PPP_Glo.prcOpt_Ex.csThresGF=0.15;
else if (sample<=100.0) PPP_Glo.prcOpt_Ex.csThresGF=0.25;
else PPP_Glo.prcOpt_Ex.csThresGF=0.35;
b=1;
}
if (PPP_Glo.prcOpt_Ex.bUsed_mwCs==1&&fabs(PPP_Glo.prcOpt_Ex.csThresMW)<0.01) {
if (sample<=1.0) PPP_Glo.prcOpt_Ex.csThresMW=2.5;
else if (sample<=20.0) PPP_Glo.prcOpt_Ex.csThresMW=(2.5)/(20.0-0.0)*sample+2.5;
else if (sample<=60.0) PPP_Glo.prcOpt_Ex.csThresMW=5.0;
else PPP_Glo.prcOpt_Ex.csThresMW=7.5;
b=1;
}
return b;
}
else {
//sample<=0.0
PPP_Glo.prcOpt_Ex.csThresGF=0.15;
PPP_Glo.prcOpt_Ex.csThresMW=5.0;
b=0;
}
return b;
}
- 循环调用
inputobs()传入一个历元的观测值。 - 调用
obsScan_SPP()筛选出能进行 SPP 解算的观测值。 - 调用
BDmultipathCorr()修正北斗伪距延迟。 - 调用
rtkpos()进行下一步处理。 - 处理完之后调用
outResult()、outsol()输出结果。
static void procpos(rtk_t *rtk,const prcopt_t *popt,const solopt_t *sopt,int mode)
{
sol_t sol={{0}};
gtime_t time={0};
obsd_t obs[MAXOBS];
int i,j,k=0,nep=0,nobs,n,solstatic,pri[]={0,1,2,3,4,5,1,6};
solstatic=sopt->solstatic&&popt->mode==PMODE_PPP_STATIC;
// 循环调用 inputobs() 传入一个历元的观测值
/* processing epoch-wise */
while ((nobs=inputobs(obs,obss,PPP_Glo.revs,&PPP_Glo.iObsu,&PPP_Glo.iEpoch))>=0) {
PPP_Glo.tNow=obs[0].time;
time2epoch(PPP_Glo.tNow,PPP_Glo.ctNow);
sprintf(PPP_Glo.chTime,"%02.0f:%02.0f:%04.1f%c",PPP_Glo.ctNow[3],
PPP_Glo.ctNow[4],PPP_Glo.ctNow[5],'\0');
PPP_Glo.sowNow=time2gpst(PPP_Glo.tNow,NULL);
k++;
if (k==1) {
for (j=0;j<MAXSAT;j++) {
PPP_Glo.ssat_Ex[j].tLast=PPP_Glo.tNow;
}
}
nep=(int)(30*(60/PPP_Glo.sample));
if ((k-1)%nep==0) PPP_Glo.t_30min=PPP_Glo.tNow;
// 调用 obsScan_SPP() 观测值检测
//pseudorange observation checking
obsScan_SPP(popt,obs,nobs,&n);
if (n<=3) {
sprintf(PPP_Glo.chMsg,"*** WARNING: There are only %d satellites observed, skip SPP!\n",n);
outDebug(OUTWIN,OUTFIL,0);
continue;
}
// 调用 BDmultipathCorr() 分段函数修正北斗伪距多路径延迟
if (PPP_Glo.prcOpt_Ex.navSys&SYS_CMP) {
BDmultipathCorr(rtk,obs,n);
}
// 调用 rtkpos() 进行逐历元解算
i=rtkpos(rtk,obs,n,&navs);
if (i==-1) rtk->sol.stat=SOLQ_NONE;
else if (i==0) continue;
// 解算完之后调用 outResult()、outsol() 输出结果
if (mode==0) { /* forward/backward */
outResult(rtk,sopt);
if (!solstatic&&PPP_Glo.outFp[0])
outsol(PPP_Glo.outFp[0],&rtk->sol,sopt,PPP_Glo.iEpoch);
else if (time.time==0||pri[rtk->sol.stat]<=pri[sol.stat]) {
sol=rtk->sol;
if (time.time==0||timediff(rtk->sol.time,time)<0.0)
time=rtk->sol.time;
}
}
}
}研究发现,BDS2 卫星存在一种可能由多路径引起的卫星端的伪距观测值系统偏差,称为北斗卫星伪距偏差,也称北斗伪距多路径延迟。该伪距偏差只存在于伪距观测值,和卫星高度角密切相关,可基于观测值的 MP 组合得到:
$$
\begin{aligned} M P_{m} & =P_{m}-\frac{f_{m}^{2}+f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot L_{m} \cdot \lambda_{m}+\frac{2 f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot L_{n} \cdot \lambda_{n} \ & =M P_{m}-\frac{f_{m}^{2}+f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot M_{L_{m}}+\frac{2 f_{n}^{2}}{f_{m}^{2}-f_{n}^{2}} \cdot M_{L_{n}}+B_{m}+\varepsilon\end{aligned}
$$
式中,$m, n(m \neq n)$ 表示频率编号;$M P_{m}, M_{L_{m}}, M_{L_{n}}$ 分别表示频率

代码中,先定义了基于卫星高度角,分段线性拟合模型 IGSOCOEF、MEOCOEF;然后遍历观测值,筛选出需要改正的北斗卫星,计算角度制的高度角 elev,取高度角的十位数 b,作为从 IGSOCOEF、MEOCOEF 中取值的下标;插值计算改正量 dmp 加到伪距上。
extern void BDmultipathCorr(rtk_t *rtk, obsd_t *obs, int n)
{
int i,j,sat,prn,b;
double dmp[3],elev,a;
// 基于卫星高度角,分段线性拟合模型
const static double IGSOCOEF[3][10]={ /* m */
{-0.55,-0.40,-0.34,-0.23,-0.15,-0.04,0.09,0.19,0.27,0.35}, //B1
{-0.71,-0.36,-0.33,-0.19,-0.14,-0.03,0.08,0.17,0.24,0.33}, //B2
{-0.27,-0.23,-0.21,-0.15,-0.11,-0.04,0.05,0.14,0.19,0.32}, //B3
};
const static double MEOCOEF[3][10]={ /* m */
{-0.47,-0.38,-0.32,-0.23,-0.11,0.06,0.34,0.69,0.97,1.05}, //B1
{-0.40,-0.31,-0.26,-0.18,-0.06,0.09,0.28,0.48,0.64,0.69}, //B2
{-0.22,-0.15,-0.13,-0.10,-0.04,0.05,0.14,0.27,0.36,0.47}, //B3
};
// 遍历观测值
for (i=0;i<n&&i<MAXOBS;i++) {
sat=obs[i].sat;
// 筛选出北斗卫星
if (PPP_Glo.sFlag[sat-1].sys!=SYS_CMP) continue;
// 剔除北斗一号卫星
prn=PPP_Glo.sFlag[sat-1].prn;
if (prn<=5) continue;
// 计算角度制的高度角 elev
elev=rtk->ssat[sat-1].azel[1]*R2D;
if (elev<=0.0) continue;
for (j=0;j<3;j++) dmp[j]=0.0;
// 取高度角的十位数 b,作为从 IGSOCOEF、MEOCOEF 中取值的下标
a=elev*0.1;
b=(int)a;
// 插值计算改正量 dmp
if (prn>=6&&prn<11) { // IGSO(C06, C07, C08, C09, C10)
if (b<0) {
for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][0];
}
else if (b>=9) {
for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][9];
}
else {
for (j=0;j<3;j++) dmp[j]=IGSOCOEF[j][b]*(1.0-a+b)+IGSOCOEF[j][b+1]*(a-b);
}
}
else if (prn>=11) { // MEO(C11, C12, C13, C14)
if (b<0) {
for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][0];
}
else if (b>=9) {
for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][9];
}
else {
for (j=0;j<3;j++) dmp[j]=MEOCOEF[j][b]*(1.0-a+b)+MEOCOEF[j][b+1]*(a-b);
}
}
// 伪距加上改正量 dmp
for (j=0;j<3;j++) obs[i].P[j]+=dmp[j];
}
}遍历传入观测值列表 obs,根据启用的卫星系统 popt->navsys,排除的卫星 popt->exsats 筛选观测值,然后判断有没有伪距观测值,原路返回的 obs 就是筛选过后的观测值列表。
extern void obsScan_SPP(const prcopt_t *popt, obsd_t *obs, const int nobs, int *nValid)
{
double dt;
int i,j,n,sat,sys;
// 遍历观测值列表
for (i=n=0;i<nobs;i++) {
sat=obs[i].sat;
sys=PPP_Glo.sFlag[sat-1].sys;
// 根据启用的卫星系统 popt->navsys,排除的卫星 popt->exsats 筛选观测值
/* exclude satellites */
if (!(sys&popt->navsys)) continue;
if (popt->exsats[sat-1]) continue;
// 判断有没有伪距观测值
dt=0.0;
for (j=0;j<NFREQ;j++) {
dt+=obs[i].P[j]*obs[i].P[j];
}
if (dt==0.0) continue;
// 返回的 obs 就是筛选过后的观测值列表
obs[n++]=obs[i];
}
// 有效观测值数
if (nValid) *nValid=n;
}
- 至此已经读完了文件,开始进行逐历元解算,先调用
spp()进行 SPP 解算。 - 调用
obsScan_PPP()筛选出能进行 PPP 解算的观测值。 - 调用
clkRepair()修复钟跳。 - 调用
pppos()进行 PPP 解算。 - 调用
calDop()计算各种 DOP 值。 - 调用
keepEpInfo()存储当前历元的信息,其中会调用gfmeas()、wlAmbMeas()。
static int rtkpos(rtk_t *rtk, obsd_t *obs, int n, const nav_t *nav)
{
gtime_t time;
int nu;
char msg[128]="";
prcopt_t *opt=&rtk->opt;
rtk->sol.stat=SOLQ_NONE;
time=rtk->sol.time; /* previous epoch */
PPP_Glo.bOKSPP=1;
// 先调用 spp() 进行 SPP 解算流动站坐标,作为 PPP 初值
/* rover position by single point positioning */
if (!spp(obs,n,nav,opt,&rtk->sol,NULL,rtk->ssat,msg)) {
sprintf(PPP_Glo.chMsg,"*** ERROR: point pos error (%s)\n",msg);
outDebug(OUTWIN,OUTFIL,0);
PPP_Glo.bOKSPP=0;
PPP_Glo.nBadEpSPP++;
//fewer than 4 satellites available, skip to next epoch
if (n<=4) {
return -1;
}
}
// 计算和上一历元间时间间隔
if (time.time!=0) rtk->tt=timediff(rtk->sol.time,time);
// 调用 obsScan_PPP() 观测值检测
nu=n;
obsScan_PPP(opt,obs,n,&nu);
if (nu<=4) {
sprintf(PPP_Glo.chMsg, "*** WARNING: There are only %d satellites observed, skip PPP!\n",nu);
outDebug(OUTWIN,OUTFIL,0);
return 0;
}
// 调用 clkRepair() 修复钟跳
//clock jump repair
clkRepair(obs,nu);
// 调用 pppos() 进行 PPP 解算
/* precise point positioning */
if (opt->mode>=PMODE_PPP_KINEMA) {
pppos(rtk,obs,nu,nav);
}
else return 1;
// 调用 calDop() 计算各种 DOP 值
//calculate DOPs
calDop(rtk,obs,nu);
// 调用 keepEpInfo() 存储当前历元的信息,其中会调用 gfmeas()、wlAmbMeas()
//save the information for current epoch
keepEpInfo(rtk,obs,nu,nav);
return 1;
}一旦接收机发生钟跳,将破坏 GNSS 时标、伪距和载波相位观测值之间的一致性。根据钟跳对这三个基本量的影响方式,可将接收机钟跳分为四类,其定义与分类标准见下表:

其中,第二类和第三类钟跳会影响 MW 组合探测周跳的准确性,使其对周跳的探测失效。因此,关于接收机钟跳探测与修复的对象均是针对第二类和第三类钟跳(伪距观测值阶跃、载波相位观测值连续),采用观测值的历元间差分法进行实时钟跳探测与修复。令:
$$
\left{\begin{array}{l}\Delta P^{s}(i)=P^{s}(i)-P^{s}(i-1) \ \Delta L^{s}(i)=L^{s}(i)-L^{s}(i-1)\end{array}\right.
$$
式中, P 和 L 分别为原始的伪距和载波相位观测值。构造检验量 T 及其条件式:
$$
\left{\begin{array}{l}T^{s}(i)=\Delta P^{s}(i)-\Delta L^{s}(i) \ \left|T^{s}(i)\right|>k_{1} \approx 0.001 \cdot c\end{array}\right.
$$
式中,$k_{1}$ 为阈值。对于某一历元,当且仅当所有卫星满足上式中条件式时,才可以认为该历元时刻可能存在钟跳或所有卫星发生大周跳,此时利用下式计算钟跳候选值
钟跳修复时,采用反向修复法,即当发生第二类或第三类钟跳时,将连续的载波相位观测值调整成阶跃形式,同伪距基准保持一致。其修复公式为: $$ \tilde{L}^{s}(i)=L^{s}(i)+J \cdot c / \alpha $$ 式中,$\tilde{L}^{s}(i)$ 为修复后的载波相位观测值。
时标的跳变量的时间(以 ms 为单位)、伪距的跳变量是距离(以 m 为单位)、载波相位的跳变量是相位(以周为单位),要注意三者的转换。下面介绍代码:
-
先遍历传入的历元观测值列表 obs,没有双频伪距载波,直接跳过;
-
计算两时刻两时刻一二频率伪距载波变化量 d1、d2、d3、d4,
-
如果两时刻一频率伪距载波变化量的差值 d1-d3 超过了一毫秒的光程 290000,说明有毫秒级的钟跳。
-
平均一二频率平均跳变量 d1、d2(d2 没用到)。
-
存改正量到
PPP_Glo.clkJump -
载波相位加上钟跳改正量
ddd2/lam
static int clkRepair(obsd_t *obs, int n)
{
int i,sat,validGps,cjGps;
int bObserved[MAXPRNGPS];
double delta0=0.0,delta1=0.0,d1,d2,d3,d4,ddd1,ddd2;
double *lam;
double CJ_F1,CJ_F2;
for (i=0;i<MAXPRNGPS;i++) bObserved[i]=0;
validGps=cjGps=0;
// 遍历传入的历元观测值列表 obs
for (i=0;i<n;i++) {
sat=obs[i].sat;
lam=PPP_Glo.lam[sat-1];
if (sat>MAXPRNGPS) continue;
// 没有双频伪距载波,直接跳过
if (obs[i].P[0]*obs[i].P[1]*obs[i].L[0]*obs[i].L[1]==0.0) continue;
if (PPP_Glo.obs0[sat-1][0]*PPP_Glo.obs0[sat-1][1]*PPP_Glo.obs0[sat-1][2]*PPP_Glo.obs0[sat-1][3]==0.0)
continue;
validGps++;
d1=obs[i].P[0]-PPP_Glo.obs0[sat-1][0]; // 两时刻一频率伪距变化量
d2=obs[i].P[1]-PPP_Glo.obs0[sat-1][1]; // 两时刻二频率伪距变化量
d3=(obs[i].L[0]-PPP_Glo.obs0[sat-1][2])*lam[0]; // 两时刻一频率相位变化量
d4=(obs[i].L[1]-PPP_Glo.obs0[sat-1][3])*lam[1]; // 两时刻二皮脸相位变化量
// 290000 是一毫秒的光程,超过了说明有毫秒级的钟跳,
if(fabs(d1-d3)>290000) // ms clock jump
{
delta0+=d1-d3;
delta1+=d2-d4;
cjGps++;
}
}
if(cjGps!=0&&cjGps==validGps)
{
// 平均跳变量 d1、d2(d2 没用到)
d1=delta0/cjGps;
d2=delta1/cjGps;
CJ_F1=0.0; // flag for clock jump
CJ_F2=0.0;
CJ_F1=d1/CLIGHT*1000.0;
CJ_F2=myRound(CJ_F1);
if (fabs(CJ_F1-CJ_F2)<2.5E-2)
{
PPP_Glo.clkJump+=(int)CJ_F2;
sprintf(PPP_Glo.chMsg, "*** WARNING: clock jump=%d(ms)\n",PPP_Glo.clkJump);
outDebug(OUTWIN,OUTFIL,0);
}
else
{
//
}
}
//
for (i=0;i<n;i++)
{
sat=obs[i].sat;
if (sat>MAXPRNGPS) continue;
bObserved[sat-1]=1;
PPP_Glo.obs0[sat-1][0]=obs[i].P[0];
PPP_Glo.obs0[sat-1][1]=obs[i].P[1];
PPP_Glo.obs0[sat-1][2]=obs[i].L[0];
PPP_Glo.obs0[sat-1][3]=obs[i].L[1];
ddd1=PPP_Glo.clkJump*CLIGHT/1000.0;
ddd2=PPP_Glo.clkJump*CLIGHT/1000.0;
// 载波相位加上钟跳改正量
//repair for phase observations
if(obs[i].L[0]!=0.0) obs[i].L[0]+=ddd1/lam[0];
if(obs[i].L[1]!=0.0) obs[i].L[1]+=ddd2/lam[1];
//repair for code observations
//if( obs[i].P[0]!=0.0 ) {
// obs[i].P[0]-=PPP_Glo.clkjump*CLIGHT/1000;
//}
//if( obs[i].P[1]!=0.0 ) {
// obs[i].P[1]-=PPP_Glo.clkjump*CLIGHT/1000;
//}
}
for (i=0;i<MAXPRNGPS;i++) {
if (bObserved[i]==0)
PPP_Glo.obs0[i][0]=PPP_Glo.obs0[i][1]=PPP_Glo.obs0[i][2]=PPP_Glo.obs0[i][3]=0.0;
}
return 1;
}遍历传入的观测值列表,剔除没有双频载波相位的观测值和双频伪距相差过大的观测值,原路返回的 obs 筛选过后的观测值列表。
// 筛选出能进行 PPP 解算的观测值
extern void obsScan_PPP(const prcopt_t *popt, obsd_t *obs, const int nobs, int *nValid)
{
int i,n,sat,f2;
// 遍历传入的观测值列表,剔除没有双频载波相位的观测值和双频伪距相差过大的观测值
for (i=n=0;i<nobs&&i<MAXOBS;i++) {
sat=obs[i].sat;
f2=1;
//if (NFREQ>=3&&(PPP_Glo.sFlag[sat-1].sys&(SYS_GAL|SYS_SBS))) f2=2;
if (popt->mode>=PMODE_PPP_KINEMA) {
// 剔除没有双频载波相位的观测值
if (obs[i].L[0]*obs[i].L[f2]==0.0) continue;
}
// 剔除双频伪距相差过大的观测值
if (fabs(obs[i].P[0]-obs[i].P[f2])>=200.0) continue;
// 返回的 obs 筛选过后的观测值列表
obs[n]=obs[i];
n++;
}
if (nValid) *nValid=n;
}遍历传入的观测值列表 obs,记录各系统的有效卫星数 rtk->sol.ns、高度角方位角 rtk->ssat[sat-1].azel,调用 dops() 计算各种 DOP 值,存下并返回 PDOP。
static double calDop(rtk_t *rtk, const obsd_t *obs, const int n)
{
double azel[MAXSAT*2],dop[4];
int i,num,sat;
for (i=0;i<NSYS_USED;i++) rtk->sol.ns[i]=0;
// 遍历传入的观测值列表 obs,记录各系统的有效卫星数 rtk->sol.ns、高度角方位角 rtk->ssat[sat-1].azel
for (i=num=0;i<n;i++) {
sat=obs[i].sat;
if (rtk->ssat[sat-1].vsat[0]==0) continue;
if (PPP_Glo.sFlag[sat-1].sys==SYS_GPS) rtk->sol.ns[0]++;
else if (PPP_Glo.sFlag[sat-1].sys==SYS_GLO) rtk->sol.ns[1]++;
else if (PPP_Glo.sFlag[sat-1].sys==SYS_CMP) rtk->sol.ns[2]++;
else if (PPP_Glo.sFlag[sat-1].sys==SYS_GAL) rtk->sol.ns[3]++;
else if (PPP_Glo.sFlag[sat-1].sys==SYS_QZS) rtk->sol.ns[4]++;
azel[2*num+0]=rtk->ssat[sat-1].azel[0];
azel[2*num+1]=rtk->ssat[sat-1].azel[1];
num++;
}
// 调用 dops 计算各种 DOP 值
dops(num,azel,0.0,dop);
rtk->sol.dop[1]=dop[1]; // 存下 PDOP
return dop[1]; // 返回 PDOP
}根据卫星高度角、方位角构建 H 矩阵,$H * H^T$ 得到 Q 矩阵,之后计算:
-
几何精度因子:
$G D O P=\sqrt{q_{11}+q_{22}+q_{33}+q_{44}}$ -
空间位置精度因子:
$P D O P=\sqrt{q_{11}+q_{22}+q_{33}}$ -
平面位置精度因子:$H D O P=\sqrt{q_{11}^{\prime}+q_{22}^{\prime}}$
-
高程精度因子:$ V D O P=\sqrt{q_{33}^{\prime}}$
没算接收机钟差精度因子:$T D O P=\sqrt{q_{44}}$
extern void dops(int ns, const double *azel, double elmin, double *dop)
{
double H[4*MAXSAT],Q[16],cosel,sinel;
int i,n;
for (i=0;i<4;i++) dop[i]=0.0;
// 根据卫星高度角、方位角构建 H 矩阵
for (i=n=0;i<ns&&i<MAXSAT;i++) {
if (azel[1+i*2]<elmin||azel[1+i*2]<=0.0) continue;
cosel=cos(azel[1+i*2]);
sinel=sin(azel[1+i*2]);
H[ 4*n]=cosel*sin(azel[i*2]);
H[1+4*n]=cosel*cos(azel[i*2]);
H[2+4*n]=sinel;
H[3+4*n++]=1.0;
}
if (n<4) return;
// H * H^T 得到 Q 矩阵
matmul("NT",4,4,n,1.0,H,H,0.0,Q);
if (!matinv(Q,4)) {
dop[0]=SQRT(Q[0]+Q[5]+Q[10]+Q[15]); /* GDOP */
dop[1]=SQRT(Q[0]+Q[5]+Q[10]); /* PDOP */
dop[2]=SQRT(Q[0]+Q[5]); /* HDOP */
dop[3]=SQRT(Q[10]); /* VDOP */
}
}extern void keepEpInfo(rtk_t *rtk, const obsd_t *obs, int n, const nav_t *nav)
{
int i,j,sat;
prcopt_t *opt=&rtk->opt;
double wl0,wl1,var0,var1,gf;
for (i=0;i<MAXSAT;i++) {
rtk->ssat[i].gf=0.0;
PPP_Glo.ssat_Ex[i].mw[0]=0.0;
}
// 遍历传入的 obs 观测值列表
for (i=0;i<n&&i<MAXOBS;i++) {
sat=obs[i].sat;
PPP_Glo.ssat_Ex[sat-1].tLast=PPP_Glo.tNow;
//if ( rtk->ssat[sat-1].azel[1]<rtk->opt.elmin )
// continue;
//
if ((gf=gfmeas(obs+i,nav))!=0.0)
rtk->ssat[sat-1].gf=gf;
// 计算 WL 组合,为了后面计算 MW 组合
if ((wl1=wlAmbMeas(obs+i,nav))==0.0)
continue;
wl0=PPP_Glo.ssat_Ex[sat-1].mw[1];
PPP_Glo.ssat_Ex[sat-1].mw[0]=wl1;
if (PPP_Glo.ssat_Ex[sat-1].mwIndex>0) {
j=PPP_Glo.ssat_Ex[sat-1].mwIndex;
var0=PPP_Glo.ssat_Ex[sat-1].mwVar_c;
var1=(wl1-wl0)*(wl1-wl0)-var0;
var1=var0 + var1/j;
PPP_Glo.ssat_Ex[sat-1].mw[1]=(wl0*j+wl1)/(j+1);
PPP_Glo.ssat_Ex[sat-1].mwIndex++;
PPP_Glo.ssat_Ex[sat-1].mwVar_c=var1;
}
else {
PPP_Glo.ssat_Ex[sat-1].mw[1]=wl1;
PPP_Glo.ssat_Ex[sat-1].mwIndex++;
PPP_Glo.ssat_Ex[sat-1].mwVar_c=0.25;
}
j=IB(sat,0,opt);
PPP_Glo.ssat_Ex[sat-1].arc.ifArc_m=rtk->x[j];
PPP_Glo.ssat_Ex[sat-1].arc.ifVarArc_m=rtk->P[j*rtk->nx+j];
PPP_Glo.ssat_Ex[sat-1].arc.mwArc_c=PPP_Glo.ssat_Ex[sat-1].mw[1];
PPP_Glo.ssat_Ex[sat-1].arc.mwArcVar_c=PPP_Glo.ssat_Ex[sat-1].mwVar_c;
}
}extern double gfmeas(const obsd_t *obs, const nav_t *nav)
{
const double *lam=nav->lam[obs->sat-1];
if (lam[0]==0.0||lam[1]==0.0||obs->L[0]==0.0||obs->L[1]==0.0) return 0.0;
return lam[0]*obs->L[0]-lam[1]*obs->L[1];
}extern double wlAmbMeas(const obsd_t *obs, const nav_t *nav)
{
int i=0,j=1;
const double *lam=nav->lam[obs->sat-1];
double P1,P2,P1_C1,P2_C2,lam1,lam2,res;
if (obs->L[i]==0.0) return 0.0;
if (obs->L[j]==0.0) return 0.0;
if (obs->P[i]==0.0) return 0.0;
if (obs->P[j]==0.0) return 0.0;
if (lam[i]*lam[j]==0.0) return 0.0;
P1=obs->P[i];
P2=obs->P[j];
P1_C1=nav->cbias[obs->sat-1][1];
P2_C2=nav->cbias[obs->sat-1][2];
if (obs->code[0]==CODE_L1C) P1+=P1_C1; /* C1->P1 */
if (obs->code[1]==CODE_L2C) P2+=P2_C2; /* C2->P2 */
lam1=lam[i];
lam2=lam[j];
res=(obs->L[i]-obs->L[j])-(lam2-lam1)/(lam1+lam2)*(P1/lam1+P2/lam2);
return res;
}