
- Project overview
- Setting up the environment
- Project Setup
- Filtering and segmentation
- Euclidean Clustering with ROS and PCL
- Object Recognition
- creating
.yamlfiles
A PR2 robot is in front of a table with multiple objects on it. It needs to pick the objects based on how they are ordered on a provided list (book, glue, snacks, soap, etc.) and place them into the object's designated bin. The robot has an RGBD feed, meaning it can see, and it can judge distances. Unfortunately, it does not know what the objects in the list are, what they look like, and how to identify them. It also does not know where the table ends, and where the objects on the table begin. To the robot, it all seems to appear as one single object.
As such, the tasks required to be accomplished in this project are the following. First, we need to enable the robot to segment the items on the table from each other, and from the table itself. It should know that the soap lying on the table is not part of the table, and that the table is not part of the soap. Secondly, we need to enable to robot to know what a book, or any of the other objects on the table look like, so that it will be able to identify one when seen. Lastly, once the robot is able to properly identify all the objects on the table, it should be able to pick these objects and place them into their designated bins.
I have used the robo-nd VM to run this project.
For this setup, catkin_ws is the name of active ROS Workspace, if your workspace name is different, change the commands accordingly If you do not have an active ROS workspace, you can create one by:
$ mkdir -p ~/catkin_ws/src
$ cd ~/catkin_ws/
$ catkin_makeNow that you have a workspace, clone or download this repo into the src directory of your workspace:
$ cd ~/catkin_ws/src
$ git clone https://github.com/udacity/RoboND-Perception-Project.gitNote: If you have the Kinematics Pick and Place project in the same ROS Workspace as this project, please remove the 'gazebo_grasp_plugin' directory from the RoboND-Perception-Project/ directory otherwise ignore this note.
Now install missing dependencies using rosdep install:
$ cd ~/catkin_ws
$ rosdep install --from-paths src --ignore-src --rosdistro=kinetic -yBuild the project:
$ cd ~/catkin_ws
$ catkin_makeAdd following to your .bashrc file
export GAZEBO_MODEL_PATH=~/catkin_ws/src/RoboND-Perception-Project/pr2_robot/models:$GAZEBO_MODEL_PATH
If you haven’t already, following line can be added to your .bashrc to auto-source all new terminals
source ~/catkin_ws/devel/setup.bash
NOTE : you should have sensor_stick folder from here in ~/catkin_ws/src
To run the demo:
$ cd ~/catkin_ws/src/RoboND-Perception-Project/pr2_robot/scripts
$ chmod u+x pr2_safe_spawner.sh
$ ./pr2_safe_spawner.sh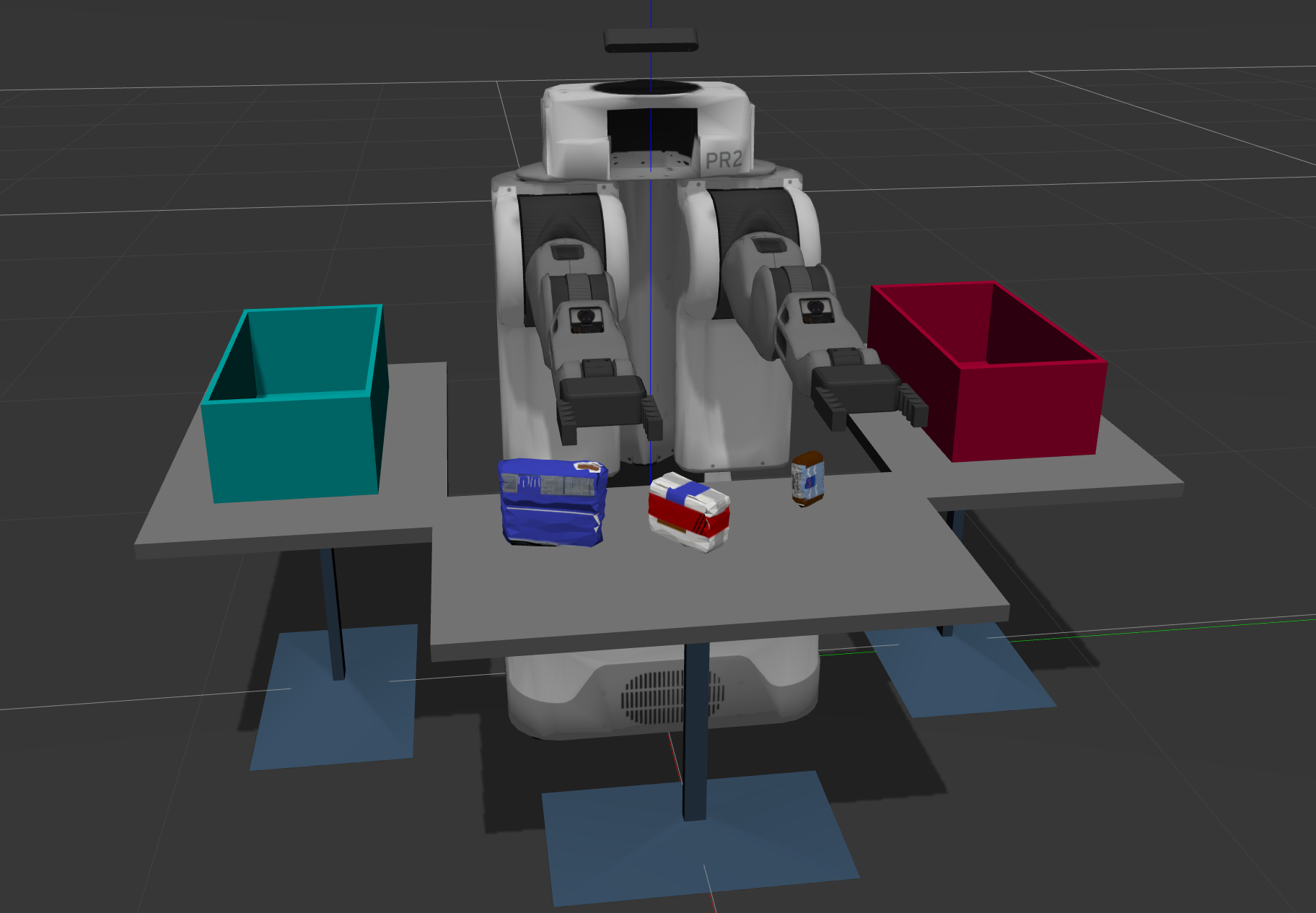
Once Gazebo is up and running, make sure you see following in the gazebo world:
-
Robot
-
Table arrangement
-
Three target objects on the table
-
Dropboxes on either sides of the robot
If any of these items are missing, please report as an issue on the waffle board.
In your RViz window, you should see the robot and a partial collision map displayed:
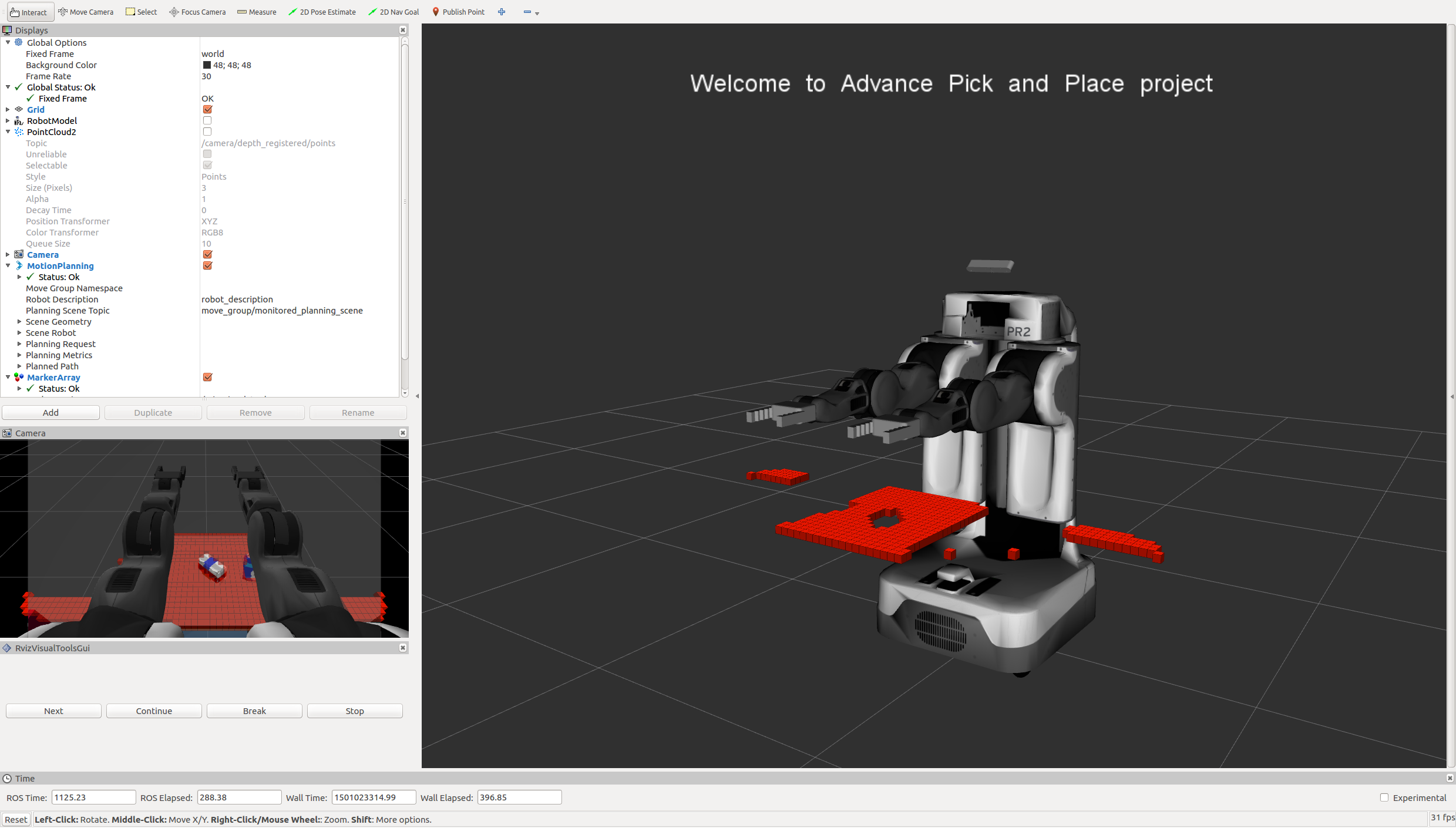
Proceed through the demo by pressing the ‘Next’ button on the RViz window when a prompt appears in your active terminal
The demo ends when the robot has successfully picked and placed all objects into respective dropboxes (though sometimes the robot gets excited and throws objects across the room!)
Close all active terminal windows using ctrl+c before restarting the demo.
You can launch the project scenario like this:
$ roslaunch pr2_robot pick_place_project.launchAll coming parts are implemented in project_template.py file
first step is to isolate the objects of interest from the rest of the scene.
we do that by using two methods
# Assign axis and range to the passthrough filter object
passthrough = cloud_filtered.make_passthrough_filter()
passthrough.set_filter_field_name("z")
axis_min = 0.5
axis_max = 0.8
passthrough.set_filter_limits(axis_min, axis_max)
# Assign axis and range to the passthrough filter object.
filter_axis = 'x'
passthrough.set_filter_field_name(filter_axis)
axis_min = 0.4
axis_max = 1
passthrough.set_filter_limits(axis_min, axis_max)
# applay passThrough filters
cloud_filtered = passthrough.filter()seg = cloud_filtered.make_segmenter()
# Set the model
seg.set_model_type(pcl.SACMODEL_PLANE)
seg.set_method_type(pcl.SAC_RANSAC)
# Max distance for a point to be considered fitting the model
max_distance = 0.01
seg.set_distance_threshold(max_distance)
# Call the segment function to obtain set of inlier indices and model coefficients
inliers, coefficients = seg.segment()
# Extract inliers and outliers
cloud_table = cloud_filtered.extract(inliers,False)
cloud_objects = cloud_filtered.extract(inliers,True)we use euclidean clustering to cluster objects
# Euclidean Clustering ( clustering objects )
white_cloud = XYZRGB_to_XYZ(cloud_objects)
tree = white_cloud.make_kdtree()
# Create a cluster extraction object
ec = white_cloud.make_EuclideanClusterExtraction()
# Set tolerances for distance threshold
# as well as minimum and maximum cluster size (in points)
ec.set_ClusterTolerance(0.025)
ec.set_MinClusterSize(5)
ec.set_MaxClusterSize(1000)
# Search the k-d tree for clusters
ec.set_SearchMethod(tree)
# Extract indices for each of the discovered clusters
cluster_indices = ec.Extract()
# Create Cluster-Mask Point Cloud to visualize each cluster separately
#Assign a color corresponding to each segmented object in scene
cluster_color = get_color_list(len(cluster_indices))
color_cluster_point_list = []
for j, indices in enumerate(cluster_indices):
for i, indice in enumerate(indices):
color_cluster_point_list.append([white_cloud[indice][0],
white_cloud[indice][1],
white_cloud[indice][2],
rgb_to_float(cluster_color[j])])
#Create new cloud containing all clusters, each with unique color
cluster_cloud = pcl.PointCloud_PointXYZRGB()
cluster_cloud.from_list(color_cluster_point_list)Now we are ready to recognize objects using clusters from prevoious step, to do that we train SVM to recognize our objects, we do that in two steps
this part implemented in capture_features.py file in sensor_stick folder, after this step we will have training_set.sav file in ~\catkin_ws and we will use this to train our SVM model
we can do this step by this two commands
$ roslaunch sensor_stick robot_spawn.launch
$ rosrun sensor_stick capture_features.pycapture_features.py depend on feature.py file which compute color histograms and normal histograms using two functions
def compute_color_histograms(cloud, using_hsv=False):
# Compute histograms for the clusters
point_colors_list = []
# Step through each point in the point cloud
for point in pc2.read_points(cloud, skip_nans=True):
rgb_list = float_to_rgb(point[3])
if using_hsv:
point_colors_list.append(rgb_to_hsv(rgb_list) * 255)
else:
point_colors_list.append(rgb_list)
# Populate lists with color values
channel_1_vals = []
channel_2_vals = []
channel_3_vals = []
for color in point_colors_list:
channel_1_vals.append(color[0])
channel_2_vals.append(color[1])
channel_3_vals.append(color[2])
# TODO: Compute histograms
hist_ch1 = np.histogram(channel_1_vals,bins=32,range=(0,256))
hist_ch2 = np.histogram(channel_2_vals,bins=32,range=(0,256))
hist_ch3 = np.histogram(channel_3_vals,bins=32,range=(0,256))
# TODO: Concatenate and normalize the histograms
features = np.concatenate((hist_ch1[0],hist_ch2[0],hist_ch3[0])).astype(np.float64)
normed_features =features/np.sum(features)
# Generate random features for demo mode.
# Replace normed_features with your feature vector
#normed_features = np.random.random(96)
return normed_features
def compute_normal_histograms(normal_cloud):
norm_x_vals = []
norm_y_vals = []
norm_z_vals = []
for norm_component in pc2.read_points(normal_cloud,
field_names = ('normal_x', 'normal_y', 'normal_z'),
skip_nans=True):
norm_x_vals.append(norm_component[0])
norm_y_vals.append(norm_component[1])
norm_z_vals.append(norm_component[2])
# Compute histograms of normal values (just like with color)
hist_x = np.histogram(norm_x_vals)
hist_y = np.histogram(norm_y_vals)
hist_z = np.histogram(norm_z_vals)
# Concatenate and normalize the histograms
features = np.concatenate((hist_x[0],hist_y[0],hist_z[0])).astype(np.float64)
# Generate random features for demo mode.
# Replace normed_features with your feature vector
normed_features = features/np.sum(features)
return normed_featuresthis part is implemented in train_svm.py file in sensor_stick folder
we can do this step by this command
$ rosrun sensor_stick train_svm.pyhere are confusion matrix and normalized confusion matrix after we trained out model

from confusion matrix we noticed that snacks have accuracy only 60% and biscuits and book have 70% accuracy, so we could improve our model by generating more sample for this objects or using other color space, but it worked fine with this accuracy in recognition step
now we have model.sav in ~\catkin_ws
now we can use our model to recognize objects detected in front of our PR2 robot and publish labels to ros topic
detected_objects_labels = []
detected_objects = []
# Classify the clusters! (loop through each detected cluster one at a time)
for i,pts_list in enumerate(cluster_indices):
# Grab the points for the cluster
pcl_cluster = cloud_objects.extract(pts_list)
ros_cluster = pcl_to_ros(pcl_cluster)
# Compute the associated feature vector
color_hist = compute_color_histograms(ros_cluster,True)
normals = get_normals(ros_cluster)
nhists = compute_normal_histograms(normals)
feature = np.concatenate((color_hist, nhists))
# Make the prediction
prediction = clf.predict(scaler.transform(feature.reshape(1,-1)))
label = encoder.inverse_transform(prediction)[0]
detected_objects_labels.append(label)
# Publish a label into RViz
label_pos = list(white_cloud[pts_list[0]])
label_pos[2] += .4
object_markers_pub.publish(make_label(label,label_pos, i))
# Add the detected object to the list of detected objects.
do = DetectedObject()
do.label = label
do.cloud = ros_cluster
detected_objects.append(do)
# Publish the list of detected objects
rospy.loginfo('Detected {} objects: {}'.format(len(detected_objects_labels), detected_objects_labels))
# Publish the list of detected objects
# This is the output you'll need to complete the upcoming project!
detected_objects_pub.publish(detected_objects)now we are ready to creat ros message and save them in .yaml files , we dow that using three functions
# Helper function to create a yaml friendly dictionary from ROS messages
def make_yaml_dict(test_scene_num, arm_name, object_name, pick_pose, place_pose):
yaml_dict = {}
yaml_dict["test_scene_num"] = test_scene_num.data
yaml_dict["arm_name"] = arm_name.data
yaml_dict["object_name"] = object_name.data
yaml_dict["pick_pose"] = message_converter.convert_ros_message_to_dictionary(pick_pose)
yaml_dict["place_pose"] = message_converter.convert_ros_message_to_dictionary(place_pose)
return yaml_dict
# Helper function to output to yaml file
def send_to_yaml(yaml_filename, dict_list):
print("save yaml file for : ",len(dict_list))
data_dict = {"object_list": dict_list}
with open(yaml_filename, 'w') as outfile:
yaml.dump(data_dict, outfile, default_flow_style=False)
print("finished")
# function to load parameters and request PickPlace service
def pr2_mover(object_list):
# Initialize variables
from std_msgs.msg import Int32
from std_msgs.msg import String
from geometry_msgs.msg import Pose
test_scene_num = Int32()
object_name = String()
arm_name = String()
pick_pose = Pose()
place_pose = Pose()
object_list_param = rospy.get_param('/object_list')
dropbox_param = rospy.get_param('/dropbox')
test_scene_num.data = 3
# Loop through the pick list
dict_list = []
for i in range(len(object_list_param)):
object_name.data = object_list_param[i]['name']
object_group = object_list_param[i]['group']
for j,object in enumerate(object_list):
if object.label == object_name.data:
# Get the PointCloud for a given object and obtain it's centroid
points_arr = ros_to_pcl(object.cloud).to_array()
centroid = np.mean(points_arr, axis=0)[:3]
pick_pose.position.x = np.asscalar(centroid[0])
pick_pose.position.y = np.asscalar(centroid[1])
pick_pose.position.z = np.asscalar(centroid[2])
# Create 'place_pose' for the object
if object_group == "green":
position = dropbox_param[1]['position']
arm_name.data = 'right'
else:
position = dropbox_param[0]['position']
arm_name.data = 'left'
place_pose.position.x = position[0]
place_pose.position.y = position[1]
place_pose.position.z = position[2]
# Create a list of dictionaries (made with make_yaml_dict()) for later output to yaml format
yaml_dict = make_yaml_dict(test_scene_num, arm_name, object_name,pick_pose, place_pose)
dict_list.append(yaml_dict)
# Outputrequest parameters into output yaml file
send_to_yaml('output_.yaml', dict_list)then we call pr2_mover at the end of pcl_callback function
after all this steps we can apply our pipline to our 3 test world and this is the result



we noticed that all objects recognized correctly.