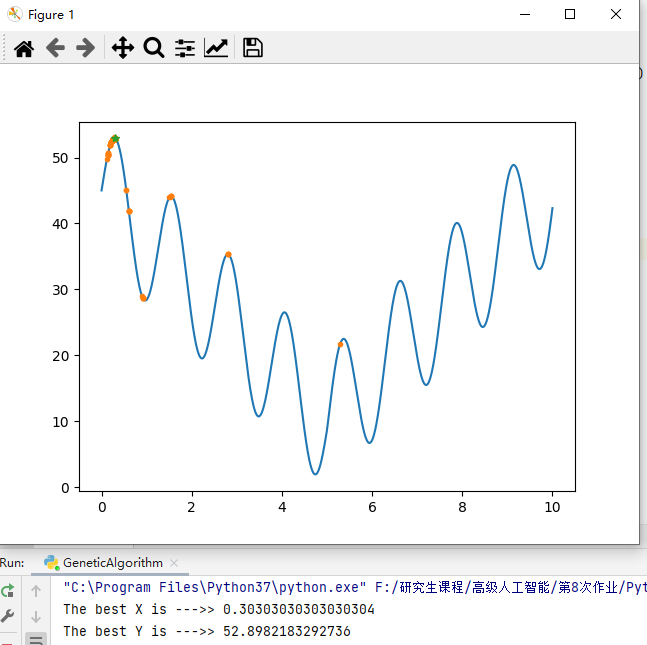
大概是做过的最不情愿的作业之一了
照着MATLAB敲的Python
很奇怪目前蚁群算法的机器人寻路,蚂蚁经常找不到终点,相比MATLAB里面实现不好
找到bug了,但是略微改了几处,导致已经不记得根本原因是哪个了,凑活用,能跑就行
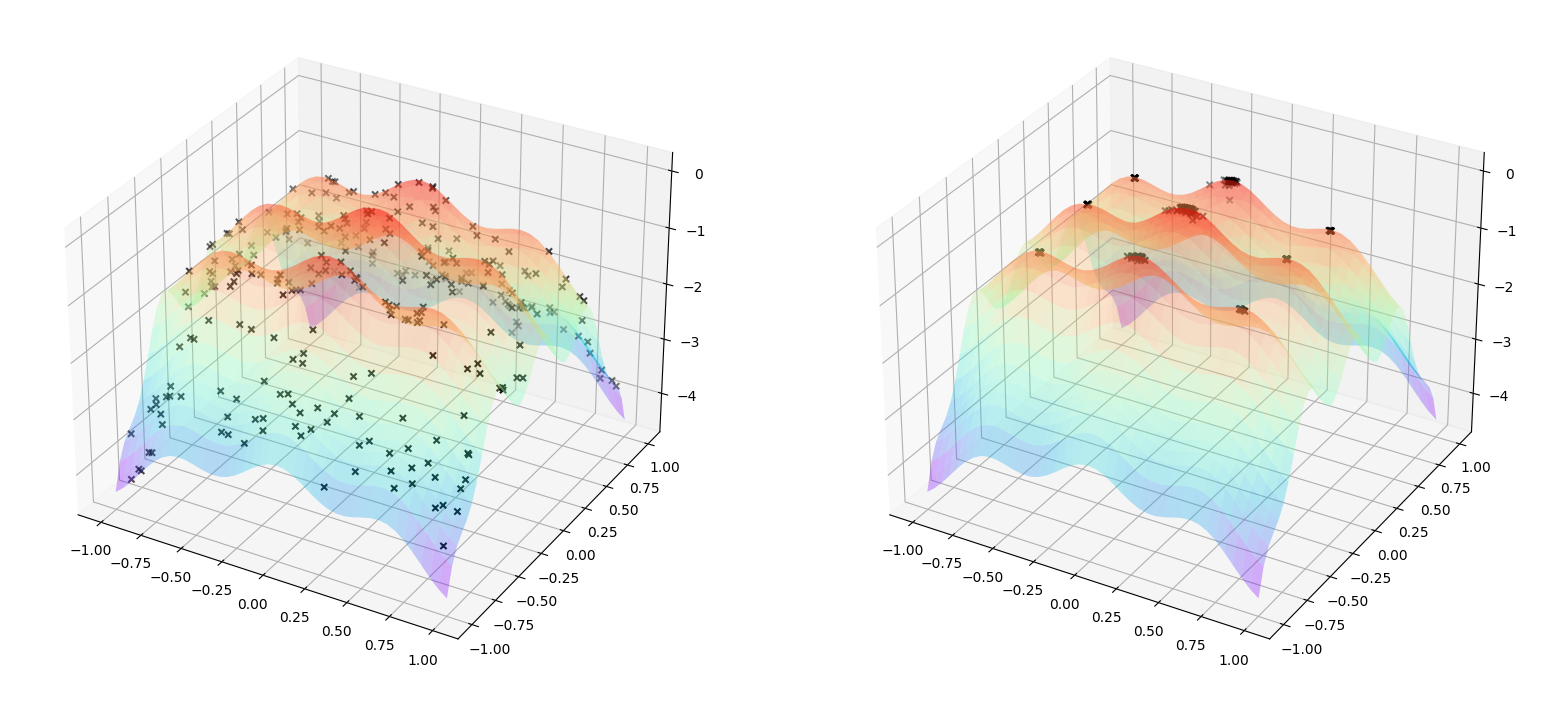
和MATLAB实现基本一致,最终输出当前迭代次数下,获得点的分布,并标记当前最优解
蚁群算法中MATLAB内有多个文件,其中:
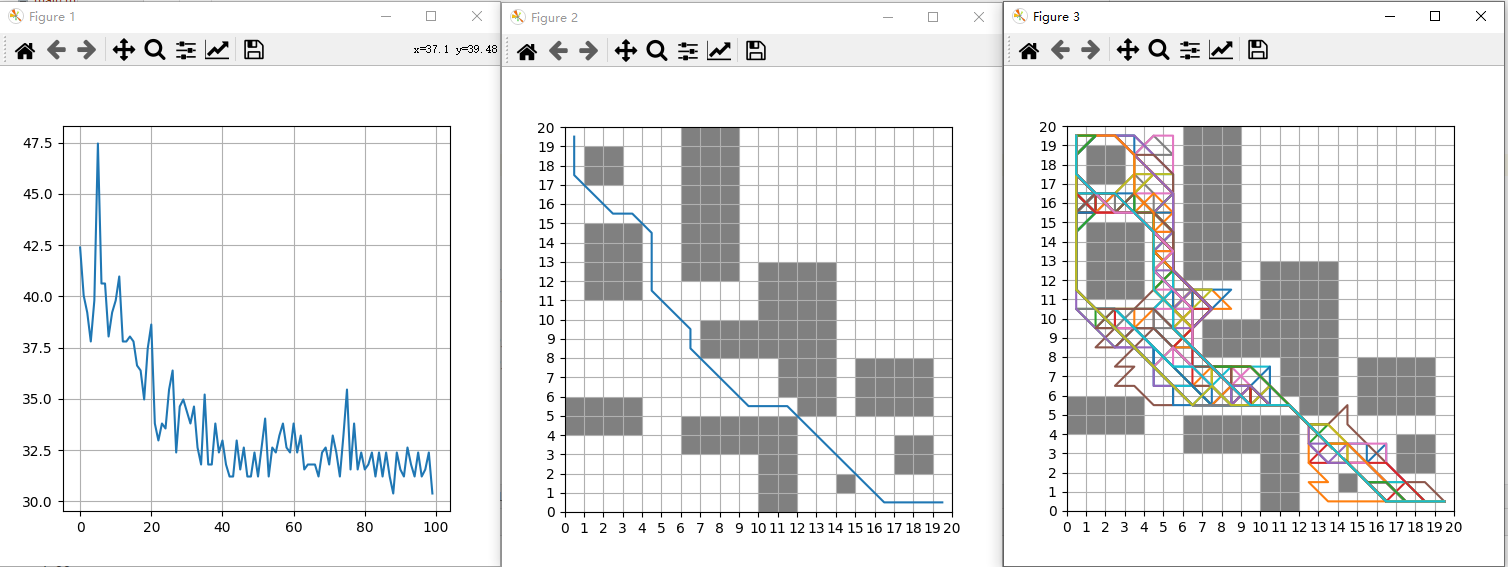
- antMain.py对应main,为机器人寻路算法,其中定义了三个参数用来决定绘制结果:
- figure1:绘制最优路径更新情况
- figure2:绘制蚂蚁最优路径
- figure3:绘制每次迭代中的蚂蚁最优路径
- antMain1.py对应main1.m,使用mode参数决定是否将每一步显示
- mode 1:显示蚂蚁的爬行过程,运行很慢
- mode 2:显示最终蚂蚁运行结果
- antMain2.py对应main2.m,分成了局部搜索和全局搜索,使用转移状态概率决定是否进行全局搜索,使用mode参数决定是否将每一步显示
- mode 1:显示蚂蚁的爬行过程,运行很慢
- mode 2:显示最终蚂蚁运行结果
- antMain3.py对应main01.m,也就是不更新荷尔蒙,使用mode参数决定是否将每一步显示
- mode 1:显示蚂蚁的爬行过程,运行很慢
- mode 2:显示最终蚂蚁运行结果
antMain.py机器人寻路算法结果如下所示:
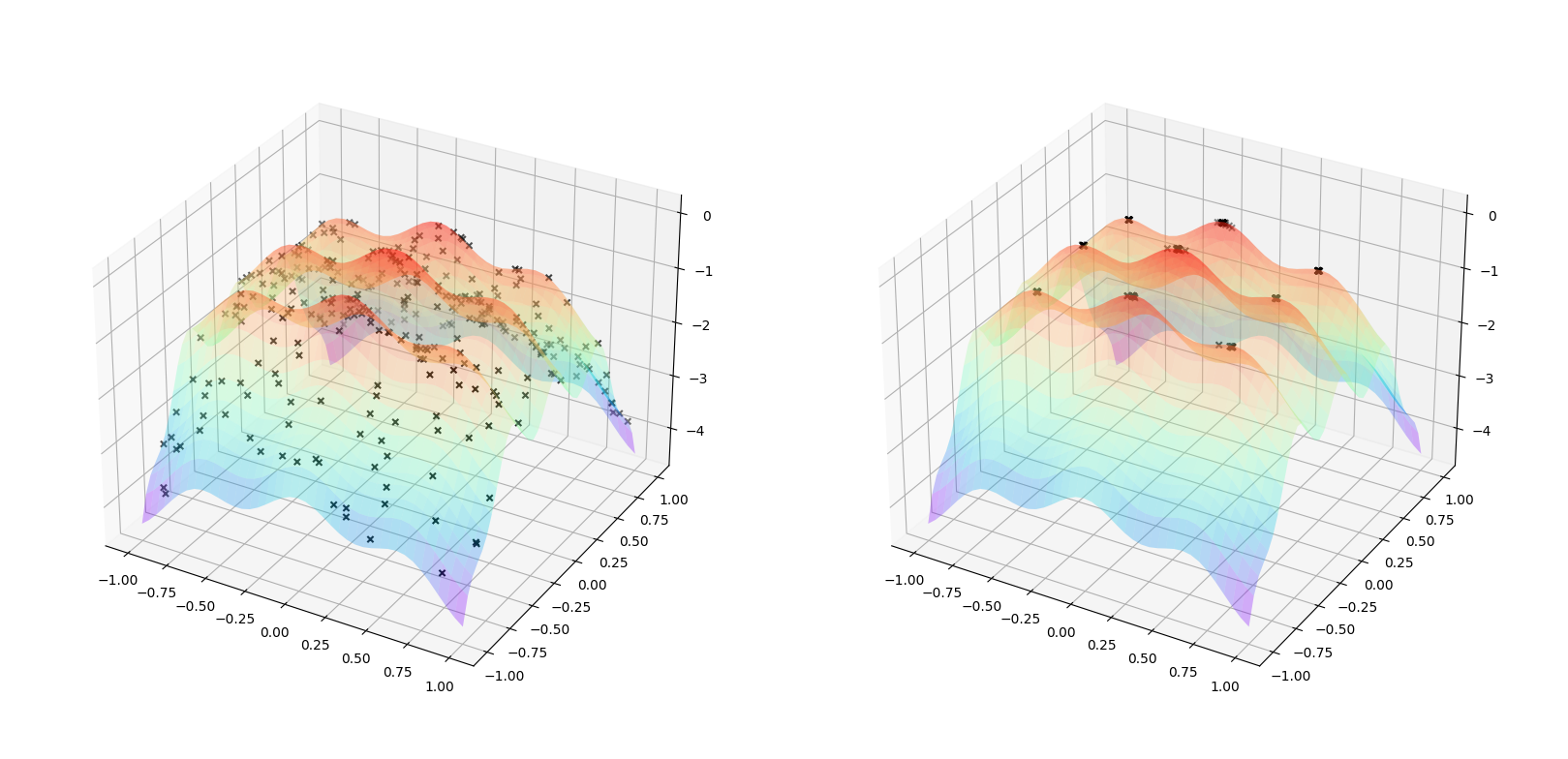
antMain1.py蚁群算法结果如下:
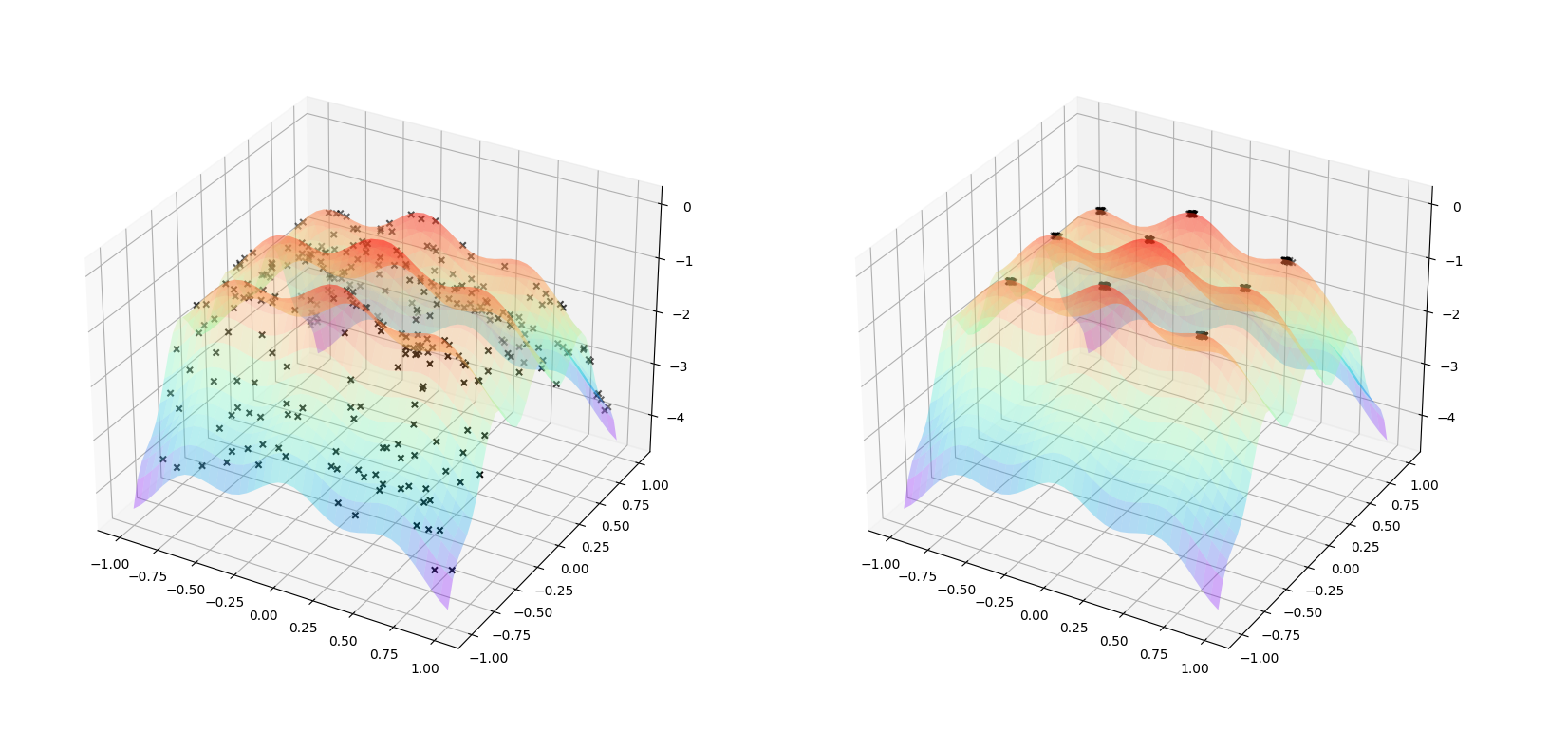
antMain2.py蚁群算法结果如下:
antMain3.py蚁群算法结果如下: